
Tingting Wei, Jiazhi Yang, Guoqing Zhou, Xiang Zhou, Xueqin Nong. Shallow-Water LiDAR Echo Signal Denoising Based on Improved EWT[J]. Chinese Journal of Lasers, 2021, 48(11): 1109001
- Chinese Journal of Lasers
- Vol. 48, Issue 11, 1109001 (2021)
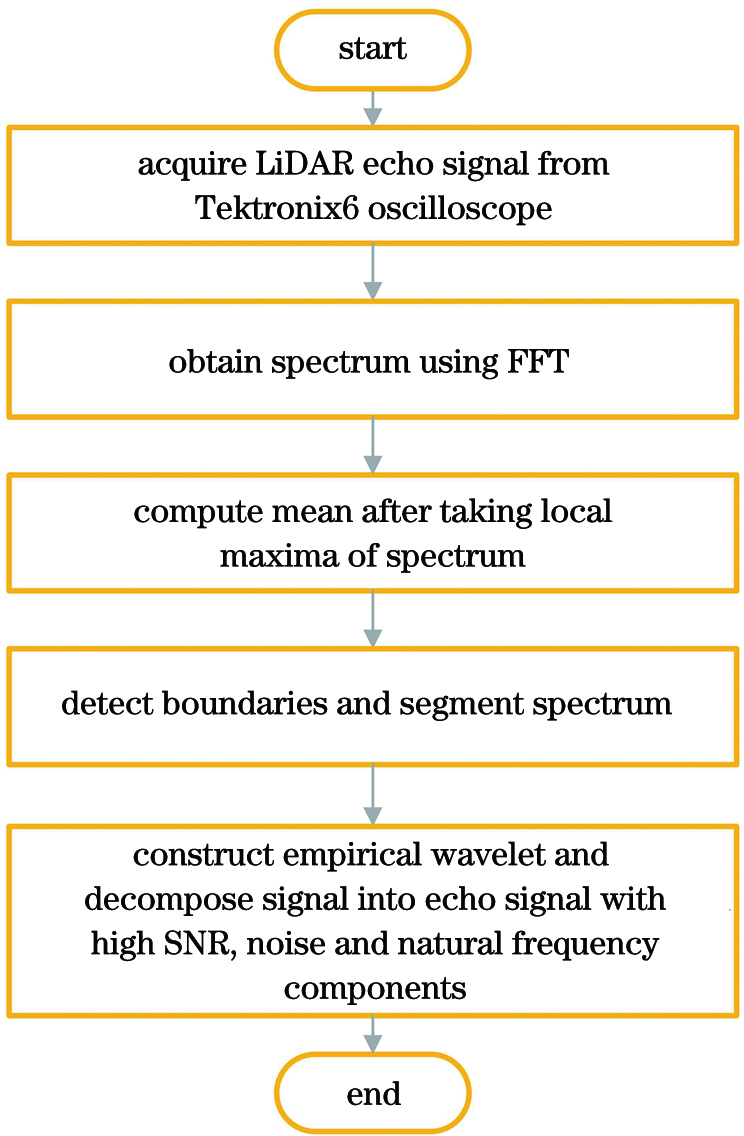
Fig. 1. Flow chart of improved EWT algorithm
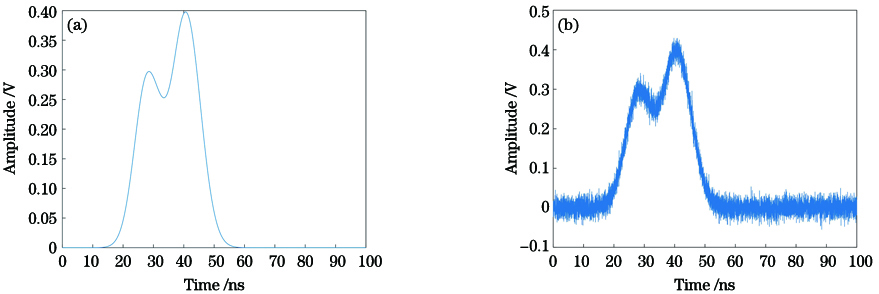
Fig. 2. Shallow-water LiDAR echo signal model. (a) Echo signal without noise; (b) echo signal with Gaussian white noise (SNR is 20 dB)
Fig. 3. Processing results of signal model using improved EWT. (a) Signal with noise and its EMFs (SNR is 20 dB); (b) comparison of signal with noise before and after denosing
Fig. 4. Shallow-water LiDAR experimental system. (a) Principle diagram; (b) practical map
Fig. 5. Measured waveforms under different water depths. (a) ΔdL1=2.127 m; (b) ΔdL1=1.621 m; (c) ΔdL1=1.434 m; (d) ΔdL1= 0.774 m
Fig. 6. Denoised waveforms under different water depths. (a) ΔdL1=2.127 m; (b) ΔdL1=1.621 m;(c) ΔdL1=1.434 m; (d) ΔdL1= 0.774 m
Fig. 7. Spectral segmentation under different boundary detect methods. (a) LocalMax; (b) LocalMaxMin; (c) Scalespace; (d) improved EWT
Fig. 8. EMFs under different boundary detect methods. (a) LocalMax; (b) LocalMaxMin; (c) Scalespace; (d) improved EWT
Fig. 9. Bathymetric errors of different denoising methods
|
Table 1. Comparison of denoising performance parameters
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Echo signal decomposition

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20