Objective It is difficult to reap the target distance and features from the shallow-water LIDAR echo signals with a low SNR, hence noise reduction is imperative. The noises in full-waveform echo signals caused by the LiDAR system in our laboratory can be divided into background noise, detector noise and preamplifier noise. Background noises stem from artificial light sources and the scattering of air, target, water surface, glass pentrough and mirrors, which are usually filtered by optical filters. Detector noises, such as shot noise, thermal noise, flicker noise and composite noise, are generated by the photons of the light source and current carriers or thermions of the device during the conversion of the optical signals received by the detector into electrical signals. In the trans-impedance amplifier, not only these noises in the weak signals will be amplified, but also its circuit devices will produce new noise. While the echo signal obtained by our experimental system also contains a natural frequency (eigen-frequency) component, which is represented as a signal that changes over time according to the law of sine or cosine. Except flicker noise, all other noises can be regarded as additive noises and conform to a Gaussian distribution. The eigen-frequency is much higher than that of a full-waveform echo signal, and the decomposition and reconstruction method can be consequently utilized to filter out most noises at high frequencies.
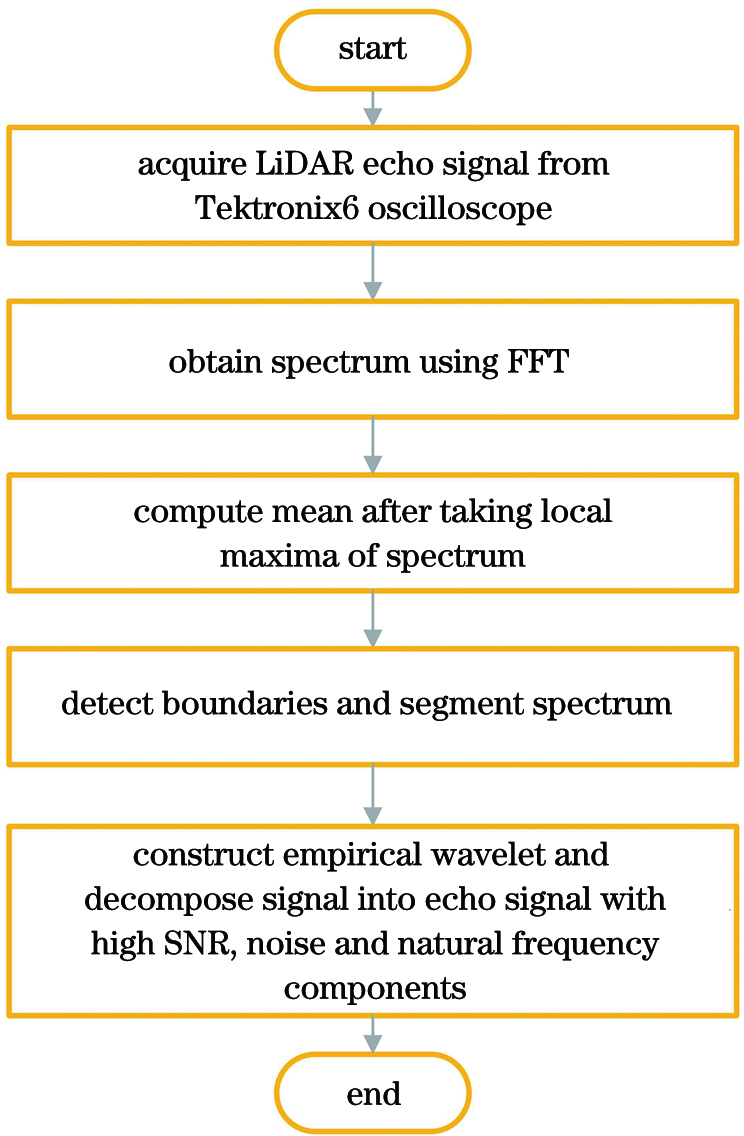
Methods The processing process of shallow-water LiDAR echo signals comprises echo signal noise reduction and full-waveform signal decomposition. The extractions of amplitude, position and full width at half maximum are associated with the distance and characteristics of the target, accordingly the procedure needs to further fit and optimize. And noise reduction of the model signal and the measured signal can be considered to verify the usability of the EWT. First, the improved boundary detect method of EWT based on the frequency characteristics of shallow-water LiDAR echo signals and established Gaussian LiDAR echo signals was used with MATLAB. Then, different algorithms were used to address same signal with a certain signal-to-noise ratio and ensure whether the improved algorithm is suitable for our echo signals with different noise reduction performance parameters. In addition, in order to further test the feasibility of the improved denoising algorithm, a self-made LiDAR was adopted to indoor bathymetric experiments. After decomposing the measured signals by EWT, the high SNR echo in the first boundary can be used to decompose full waveform signals, the system noises in the second and fourth boundaries can be used to estimate the noise levels, and the natural frequency components in the third boundary can be used to troubleshoot the fault of the LiDAR system. Finally, the peak and the full width at half maximum of the full-waveform decomposition signal (clean echoes from the water surface and bottom) were calculated using the frequently-used LM algorithm. The time interval among the peaks contributes to measure the shallow-water depth, therefore a comparison of depth measurement errors can be acquired.
Results and Discussions Common noise reduction algorithms were employed in the processing of the signals established by MATLAB (Fig. 2). Compared with other algorithms (Table 1), the improved empirical wavelet transform is advanced in the performances of computation time, cross correlation, MSE, MAE, SNR and PSNR. Adopting different algorithms to address the measured echo signals from the shallow water (from 0.5 m to 3 m) (Figs. 6 and 7), the echo signal was decomposed into the clean signal, noise and natural frequency components because the improved EWT was used to decompose the actual measurement signals in different frequency bands (Fig. 8). By comparison, the bathymetric measurement errors of the LiDAR system are less than 0.1 m using different denoising methods (Table 2 and Fig. 9).
Conclusions In present study, the improved EWT detected the boundary according to the frequency characteristics of echo signals. The functionality of the proposed method was examined by processing the model signal established in MATLAB and the measured signal from the shallow water LiDAR system in our laboratory. High performances of noise reduction and accuracy decomposition were actualized by the method, and the measured echo signal was decomposed into different components (the useful echo signal, system noise and eigenfrequency component) with dissimilar effects. After filtering the noise through the improved EWT, the data processing time could be shortened and the measurement error of shallow water depth could be cut down. This paper mainly shows the applicability of boundary detect method based on EWT algorithm in noise reduction of LiDAR echo signal. However,the setting of WT in EWT algorithm will influence the performance of noise reduction and a further research is needed.