Author Affiliations
1 Aviation Engineering Institute, Civil Aviation University of China, Tianjin 300300, China2 School of Computer Science and Technology, Civil Aviation University of China, Tianjin 300300, Chinashow less
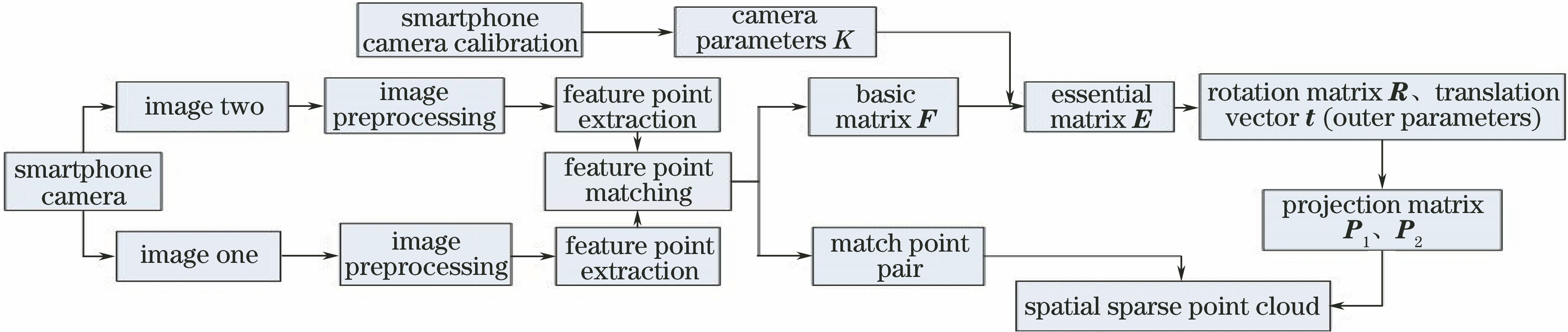
Fig. 1. Flow chart of three-dimensional reconstruction algorithm
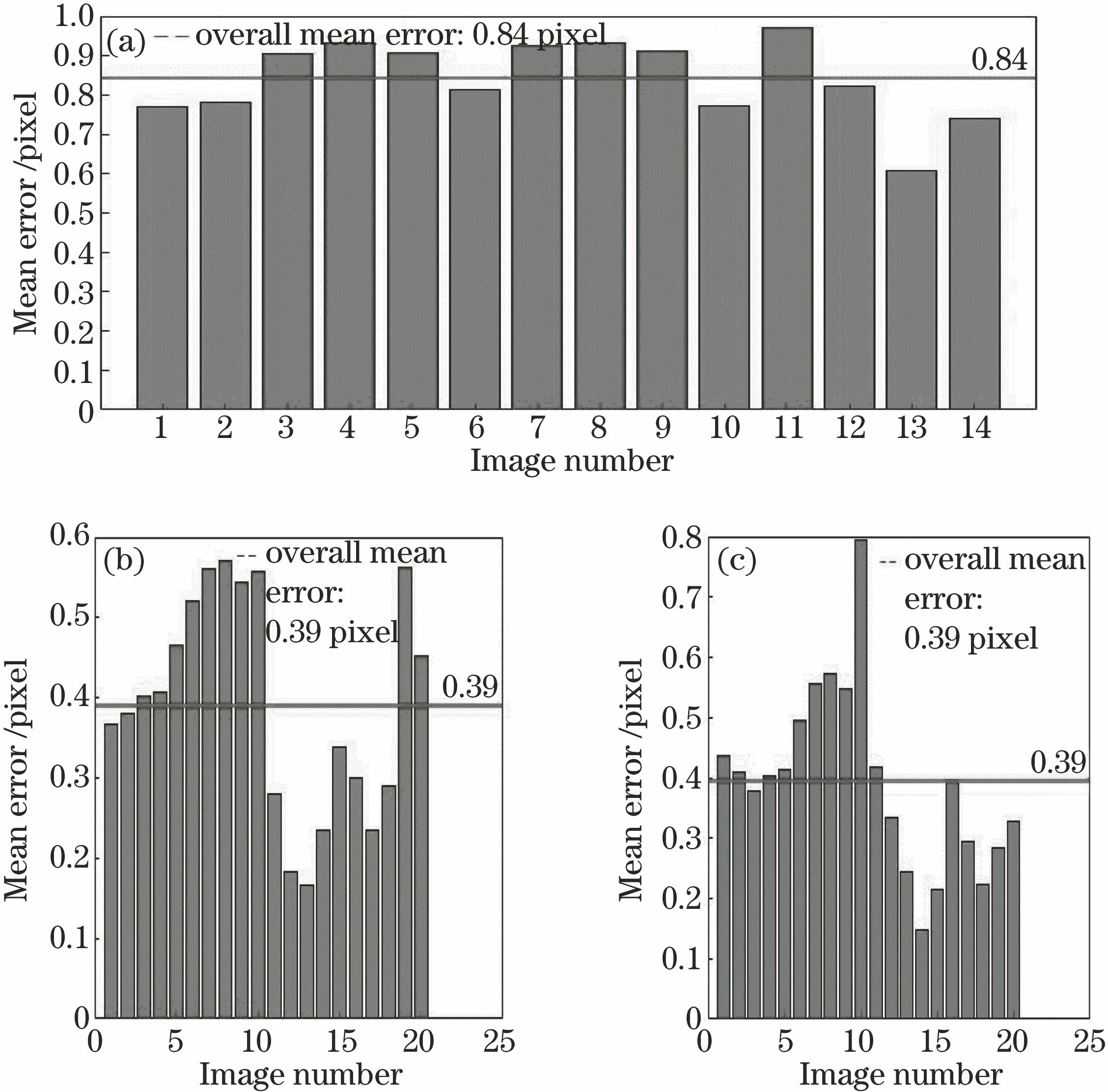
Fig. 2. Calibration residual diagram. (a) Smartphone camera; (b) left camera of industrial camera; (c) right camera of industrial camera
Fig. 3. Checkerboard calibration plate (dimensions: 63 mm×63 mm)
Fig. 4. Image captured. (a) Smartphone camera; (b) industrial camera
Fig. 5. Three-dimensional reconstruction results. (a) Smartphone camera; (b) industrial camera
Fig. 6. Image with reference points
| Camera type | Camera parameter |
|---|
| Internal reference matrix | Radial distortion | Tangential distortion |
|---|
| Smartphone camera | | | | | Industrialcamera | Leftcamera | | | | | Rightcamera | | | |
|
Table 1. Camera parameters
| Image | Originalimage /mm | After featureenhancement /mm | Medianfilter /mm |
|---|
| Smartphonecamera | Location 1 | 22.0182 | 22.0517 | 22.1054 | | Location 2 | 22.1573 | 22.2186 | 22.2961 | | Industrialcamera | Left | 24.4737 | 24.5019 | 24.5873 | | Right | 24.3971 | 24.5341 | 24.5931 |
|
Table 2. Signal-to-noise ratio of images before and after pretreatment
| Device name | Average of pointcloud distance /mm | Average of pointactual distance /mm | Scalefactor s |
|---|
| Smartphone camera | 0.625 | 10.00 | 0.0625 | | Industrial camera | 0.690 | 10.00 | 0.0690 |
|
Table 3. Distance of adjacent data points
| Object to bereconstructed | Coordinate ofthe point cloud | Point clouddistance /mm | Calculatedistance /mm | Measuringdistance /mm | Absoluteerror /mm | Relativeerror /% |
|---|
| A | (0.66,3.25,16) | 3.96 | 63.42 | 62.68 | 0.74 | 1.18 | | B | (-0.63,0.70,17.14) | 5.07 | 81.09 | 80.18 | 0.91 | 1.13 | | C | (5.54,-1.89,17.54) | | | | | | | D | (7.39,-1.51,13.78) | 0.68 | 10.90 | 10.32 | 0.58 | 5.63 | | E | (7.84,-1.55,14.29) | 4.44 | 71.00 | 70.00 | 1.00 | 1.43 | | F | (7.45,2.78,15.18) | 0.69 | 10.99 | 10.52 | 0.47 | 4.51 | | G | (7.44,3.42,15.43) | | | | | | | H | (5.59,3.34,16.92) | 4.93 | 78.91 | 80.20 | -1.29 | -1.61 | | A | (0.66,3.25,16.81) | | | | | | | Absoluteaverage | | | | | 0.83 | 2.58 |
|
Table 4. Coordinates, dimensions, and errors of smartphone camera reconstruction
| Object to bereconstructed | Coordinate ofthe point cloud | Point clouddistance /mm | Calculatedistance /mm | Measuringdistance /mm | Absoluteerror /mm | Relativeerror /% |
|---|
| A | (0.44,1.54,8.33) | 4.35 | 62.98 | 62.68 | 0.30 | 0.40 | | B | (3.49,-0.77,10.39) | 5.55 | 80.39 | 80.18 | 0.21 | 0.27 | | C | (7.88,-3.96,11.54) | | | | | | | D | (7.91,-3.98,11.64) | 0.75 | 10.93 | 10.32 | 0.61 | 5.89 | | E | (8.21,-4.03,10.95) | 4.86 | 70.41 | 70.00 | 0.41 | 0.58 | | F | (4.19,-1.41,10.19) | 0.67 | 9.74 | 10.52 | -0.78 | 7.44 | | G | (3.91,-1.38,10.80) | | | | | | | H | (3.41,4.69,11.68) | 5.47 | 79.34 | 80.20 | -0.86 | -1.08 | | A | (0.44,1.54,8.33) | | | | | | | Absoluteaverage | | | | | 0.53 | 2.62 |
|
Table 5. Coordinates, dimensions, and errors of industrial camera reconstruction
| Shooting distance /cm | Reconstruction accuracy /mm |
|---|
| 15 | 0.82 | | 20 | 0.83 | | 25 | 0.83 | | 30 | 0.85 |
|
Table 6. Reconstruction accuracy at different shooting distances