
Zuwu Wang, Jun Han, Xiaobin Sun, Bo Yang. Methodfor Orientation Determination of Transmission Line Tower Based on Visual Navigation[J]. Laser & Optoelectronics Progress, 2019, 56(8): 081006
- Laser & Optoelectronics Progress
- Vol. 56, Issue 8, 081006 (2019)
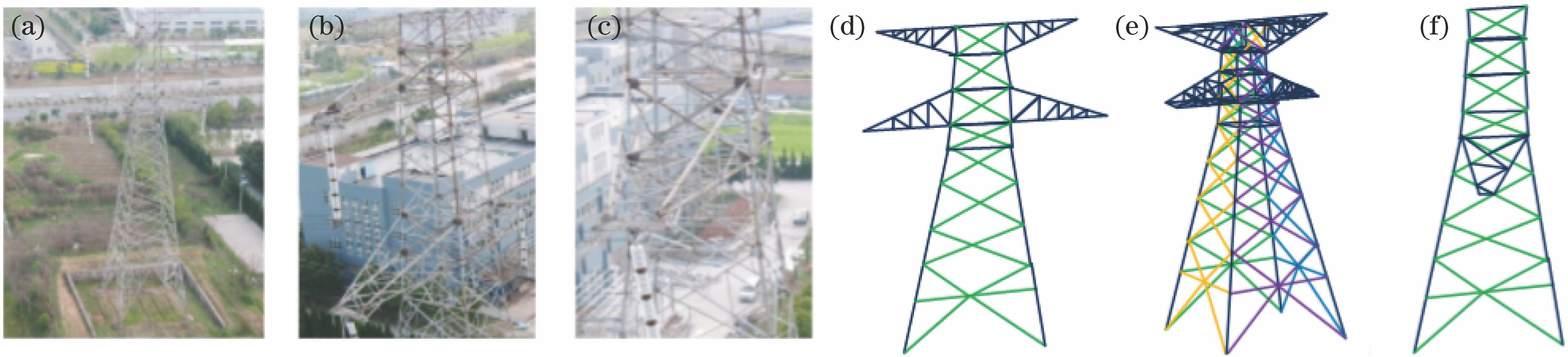
Fig. 1. Aerial images and diagrams of towers. (a) Front image; (b) front side image; (c) side image; (d) front view diagram; (e) front side view diagram; (f) side view diagram
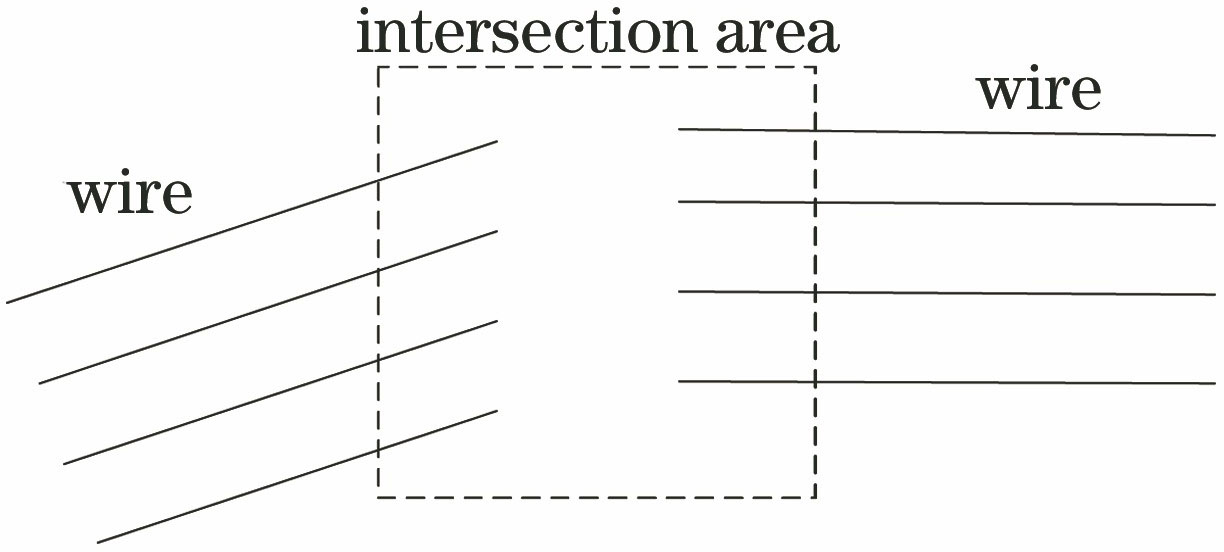
Fig. 2. Broken lines formed when wire passing through straight tower
Fig. 3. Location relationship between guiding lines and wires in tensile tower
Fig. 4. Structural characteristics of tower. (a) Cross slanted segments of tower head; (b)(c) slanted segments converged onto main frame of tower body; (d)(e) crossing characteristics in tower
Fig. 5. Framework of tower detection from far to near
Fig. 6. Calculation of gradient for each pixel point
Fig. 7. Angular distribution of gradient
Fig. 8. Gradient statistical histogram in each cell
Fig. 9. HOG feature extraction and MLP perception model classification
Fig. 10. Visual perception platform for UAV and local areas of tower under different orientations. (a) Visual perception platform for UAV; (b1) front of tower top; (b2) front side of tower top; (b3) side of tower top; (c1) front of tower body; (c2) front side of tower body; (c3) side of tower body; (d1) front of tower bottom; (d2) front side of tower bottom; (d3) side of tower bottom
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Accuracy rate of identification of local area orientation of tower
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Time required for identification of local area orientation of towerms
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Accuracy rate of local area orientation of tower after data augmentation
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Time required for local area orientation of tower after data augmentationms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20