
Liang-Qin CHEN, Ming-Xuan ZENG, Zhi-Meng XU, Zhi-Zhang CHEN. Head motion detection based on low resolution infrared array sensor[J]. Journal of Infrared and Millimeter Waves, 2023, 42(2): 276
- Journal of Infrared and Millimeter Waves
- Vol. 42, Issue 2, 276 (2023)
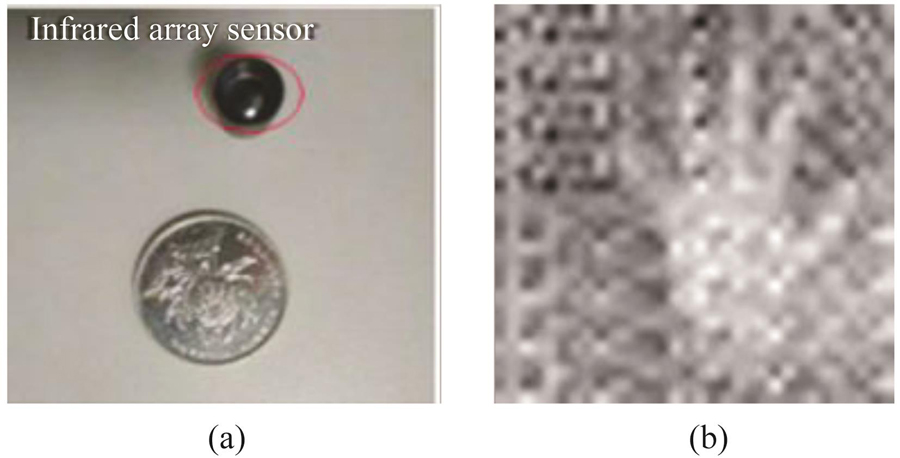
Fig. 1. Infrared array sensor,(a)physical view of the sensor,(b)infrared temperature image(palm)
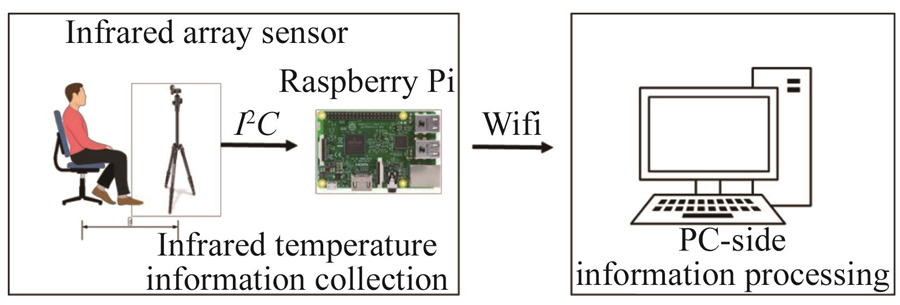
Fig. 2. System composition design
Fig. 3. Flow chart of the head motion detection algorithm
Fig. 4. Original image and pseudo-color image(the region of human head and shoulder)(a)origin image(32×32),(b)pseudo-color image(32×32),(c)pseudo-color image(64×64)
Fig. 5. Flowchart of the head salient region extraction algorithm
Fig. 6. Comparison of preprocessed results
Fig. 7. 3D image fusion of a sequence of frames
Fig. 8. Residual learning structure of ResNeXt network,(a)BottleNeck structure of ResNet network,(b)split-transform-merge structure of Inception network,(c)block structure of ResNeXt network
Fig. 9. Pro-ResNeXt50 network
Fig. 10. The training accuracy and loss of three network
Fig. 11. Experience scenarios(a)Experiments in an indoor hall,(b)Experiments in a car:Experiments were conducted in an indoor hall to simulate a driving and online learning environment,as shown in Fig. 11(a). The test user is sitting on a chair,and the sensor is fixed at the height of 1.2 m above the ground by a tripod so that it is aligned with the user’s front face. The collection distance ranges of 0.5 m to 1 m,and the collected lighting environment includes both day and night conditions.
Fig. 12. Accuracy using different methods
Fig. 13. Random continuous head movement steering
Fig. 14. Recognition accuracy in different detection distances and light conditions
|
Table 0. [in Chinese]
|
Table 1. HTPA infrared sensor specification parameters
|
Table 2. Comparison of the three networks
|
Table 3. The Precision for each activity
|
Table 4. Accuracy using different channels
|
Table 5. Accuracy and time using different network
|
Table 6. The Precision for each activity in the car

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20