
Yilin Yang, Jiying Li, Yan Wang, Yongqian Yu. Point Cloud Registration Algorithm Based on NDT and Feature Point Detection[J]. Laser & Optoelectronics Progress, 2022, 59(8): 0810016
- Laser & Optoelectronics Progress
- Vol. 59, Issue 8, 0810016 (2022)
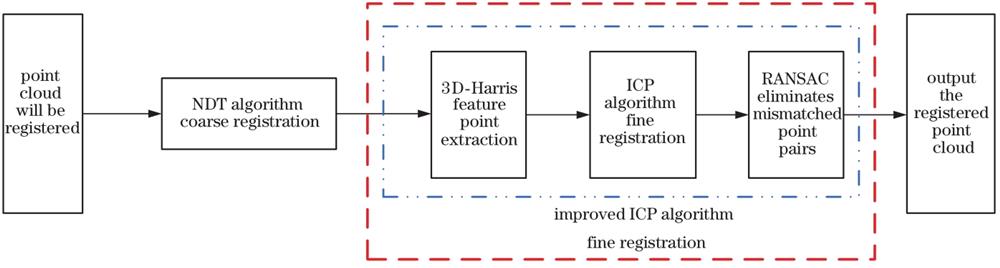
Fig. 1. Block diagram of the proposed algorithm
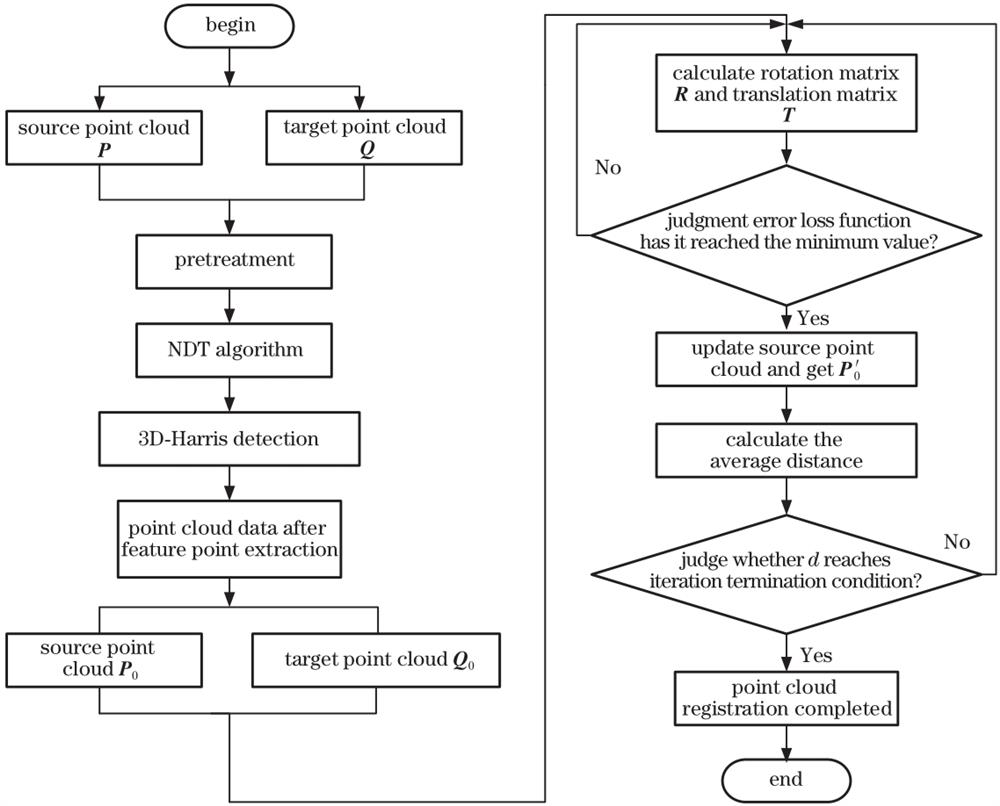
Fig. 2. Flow chart of the proposed algorithm
Fig. 3. Key point extraction results。 (a) Original point cloud; (b) result after key point extraction
Fig. 4. Registration result of the proposed algorithm. (a) Original point cloud; (b) registration result of the proposed algorithm
Fig. 5. Bunny model. (a) Original point cloud; (b) registration result of ICP algorithm; (c) coarse registration of NDT algorithm; (d) registration result of proposed algorithm
Fig. 6. Armadillo model. (a) Original point cloud; (b) registration result of ICP algorithm; (c) coarse registration of NDT algorithm; (d) registration result of proposed algorithm
|
Table 1. Running time of point cloud registration under different algorithms
|
Table 2. RMSE of point cloud registration under different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20