
Su Zhou, Di Wu, Jie Jin. Lane Instance Segmentation Algorithm Based on Convolutional Neural Network[J]. Laser & Optoelectronics Progress, 2021, 58(8): 0815007
- Laser & Optoelectronics Progress
- Vol. 58, Issue 8, 0815007 (2021)
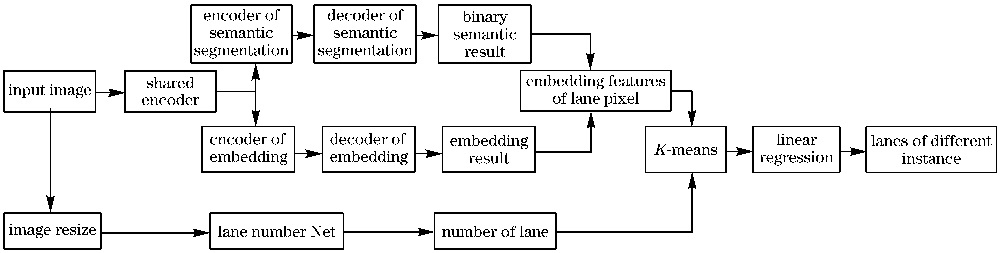
Fig. 1. Flow chart of the three-branch lane instance segmentation algorithm
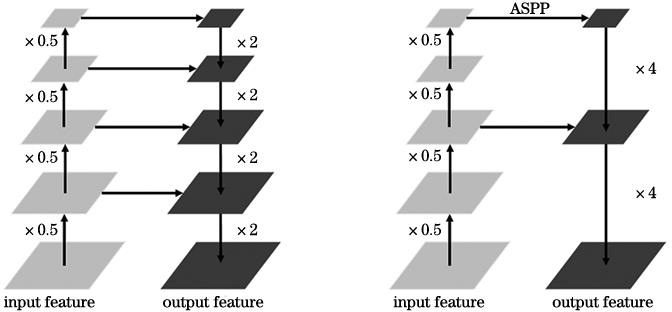
Fig. 2. Structure of the DeepLabV3+ network. (a) Encoding-decoding structure of the FPN ; (b) DeepLabV3+ network
Fig. 3. Structure of the DenseASPP
Fig. 4. Structure of the three-branch lane instance segmentation network
Fig. 5. Loss of training set and validation set
Fig. 6. Accuracy of training set and validation set
Fig. 7. Test results of different scenarios. (a) Three-lane (straight); (b) four-lane (curve); (c) vehicle occlusion environment; (d) light and shadow occlusion environment
|
Table 1. Predictive branch network for the number of lanes
|
Table 2. Accuracies of different algorithms unit: %
| |||||||||||||||||||||||||||||
Table 3. Running time of different algorithms unit: ms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20