
Zaiteng Zhang, Rongfen Zhang, Yuhong Liu. Visual Odometry Algorithm Based on Deep Learning[J]. Laser & Optoelectronics Progress, 2021, 58(4): 0415001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 4, 0415001 (2021)
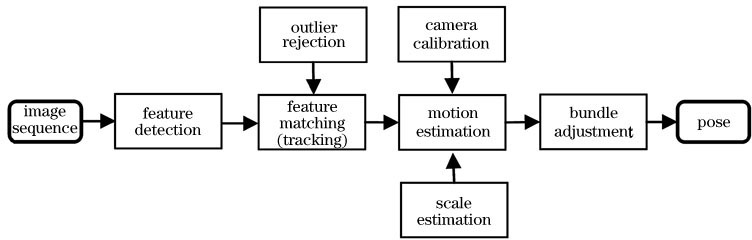
Fig. 1. Extraction framework of sparse feature method
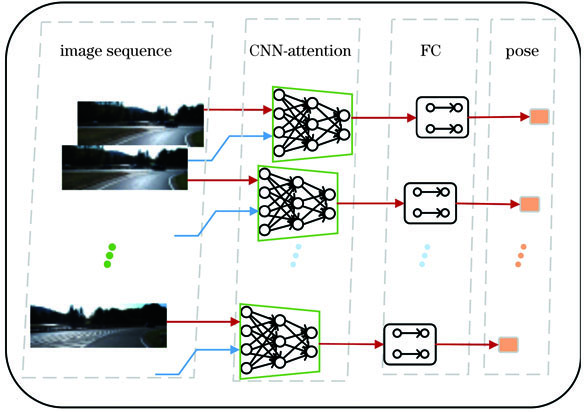
Fig. 2. Framework of proposed network
Fig. 3. Proposed neural network structure
Fig. 4. Structure of attention module
Fig. 5. Mean translation errors and mean rotation errors under different conditions. (a) Mean translation errors under different path lengths; (b) mean rotation errors under different path lengths; (c) mean translation errors under different speeds; (d) mean rotation errors under different speeds
Fig. 6. VO trajectories in different scenarios. (a) Scenario 03; (b) scenario 04; (c) scenario 09
Fig. 7. Practical experiment. (a) VO trajectory in actual scene; (b) practical map
|
Table 1. Parameters of CNN
|
Table 2. Parameter calculation of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20