
Aiguo Zhou, Jiangyang Yu, Jiakun Pu, Zhenyu Li, Ronghui Wei. Positioning Algorithm of Homonymous Object Points in Multi-Vision System Based on Weighted Levenberg-Marquardt[J]. Laser & Optoelectronics Progress, 2021, 58(24): 2415006
- Laser & Optoelectronics Progress
- Vol. 58, Issue 24, 2415006 (2021)
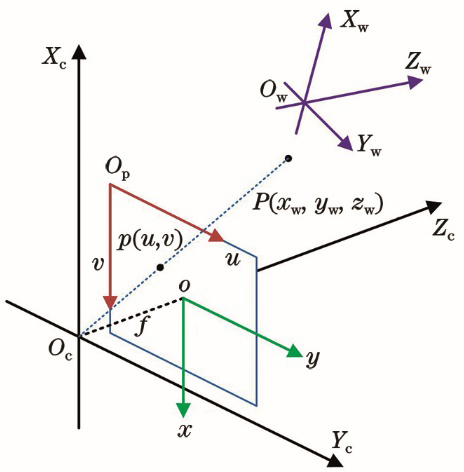
Fig. 1. Visual imaging model
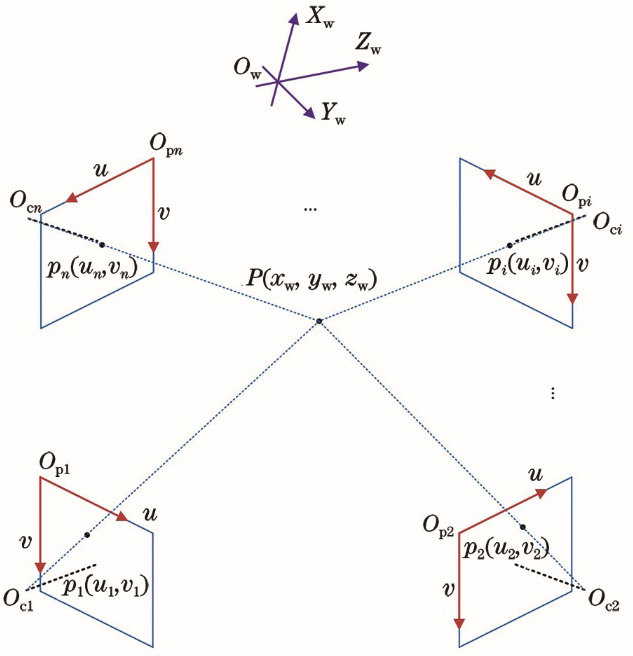
Fig. 2. Ideal multi-vision imaging system
Fig. 3. Real multi-vision imaging system
Fig. 4. Real vision measurement model
Fig. 5. Simplified vision measurement model
Fig. 6. Top view of experiment scene
Fig. 7. Comparison of pixel error
Fig. 8. Comparison of truth error
Fig. 9. Algorithm convergence curve
|
Table 1. Calibration results of internal parameters
|
Table 2. Calibration results of external parameters
|
Table 3. Number of iterations when convergence condition is reached

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20