
Cong Sun, Haibo Liu, Shengyi Chen, Yang Shang. A General Imaging Model Based Method for Scheimpflug Camera Calibration[J]. Acta Optica Sinica, 2018, 38(8): 0815009
- Acta Optica Sinica
- Vol. 38, Issue 8, 0815009 (2018)
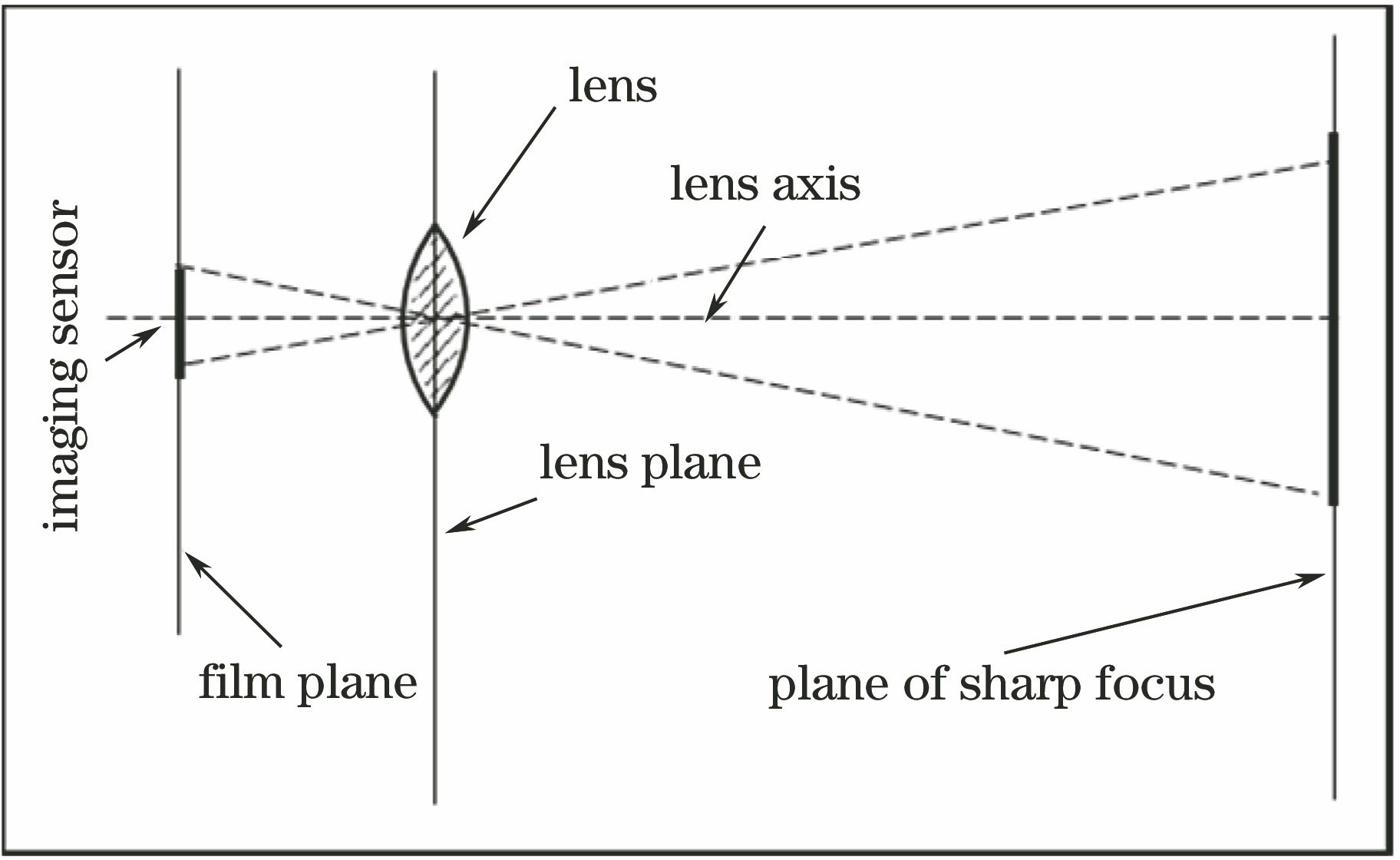
Fig. 1. Basic optical geometry of ordinary camera
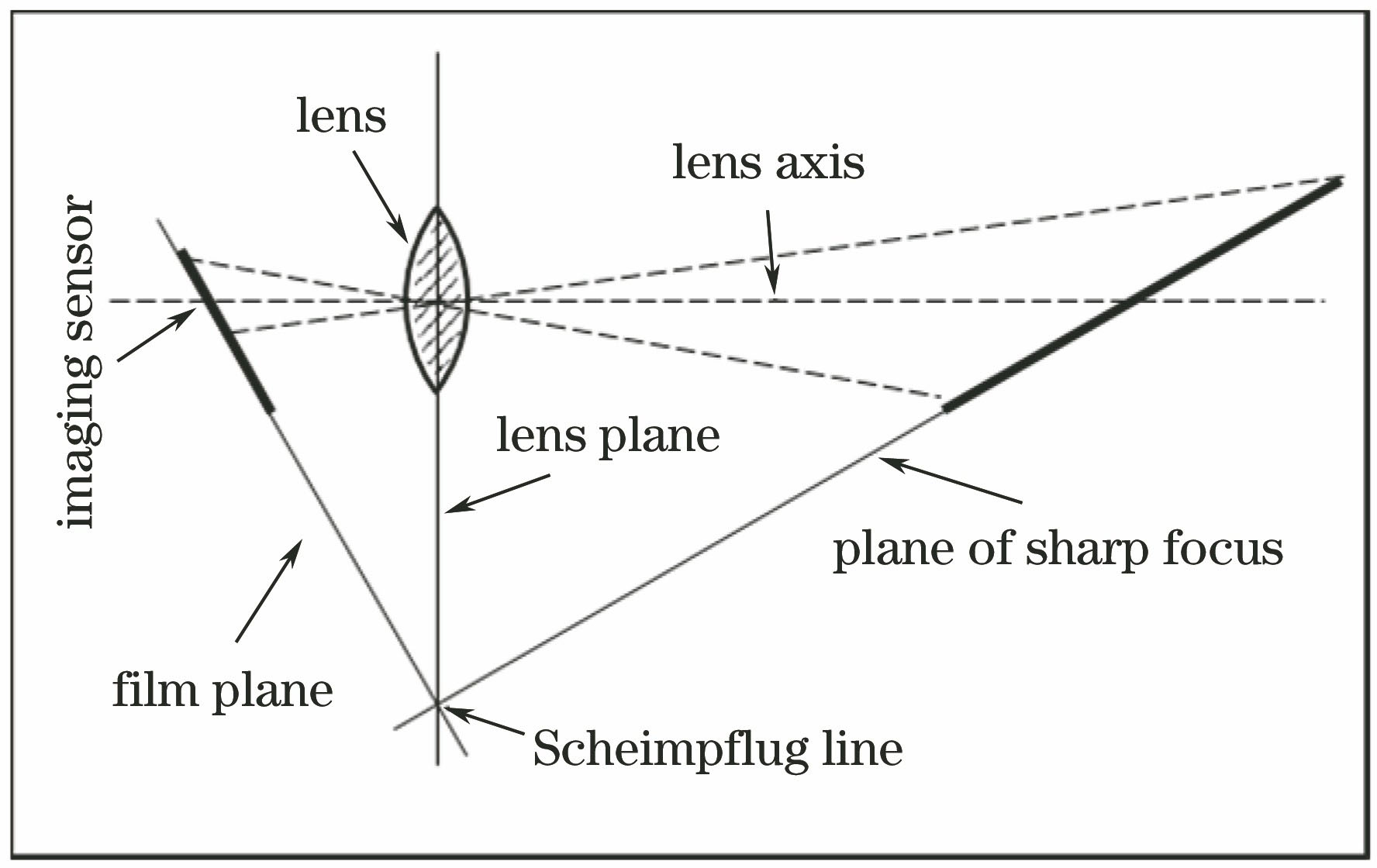
Fig. 2. Basic optical geometry of Scheimpflug camera
Fig. 3. Illustration of Hinge rule and Scheimpflug principle in joint action
Fig. 4. Schematic of Scheimpflug camera's depth-of-field
Fig. 5. Schematic of calibration principle of general imaging model[42]. (a) Camera as black box, with one pixel and its camera ray; (b) pixel sees a point on a calibration object, whose coordinates are identified in a frame associated with the object; (c) same as (b) for another position of the calibration object; (d) if the object's motion is known, the two points on the calibration object can be placed in the same coordinate frame here the same one as in (c) the camera ray is then determined by joini
Fig. 6. Schematic of general non-parametric imaging model
Fig. 7. Reconstructed results and error distribution of planar calibration plate. (a) Reconstructed results of calibration plate; (b) error distribution of reconstructed control points
Fig. 8. Two-dimensional electric rotary table
Fig. 9. Three-dimensional electric translation table
|
Table 1. Results of relative pose of calibration plate calibrated by different calibration models
|
Table 2. Deviation of calibration results using general non-parametric imaging model and classical parametric models
|
Table 3. Pose estimation accuracy of Scheimpflug camera using different imaging models


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20