
Jie Hu, Zongquan Xiong, Wencai Xu, Kai Cao, Ruoyu Lu. Lane Detection Based on a Lightweight Convolutional Neural Network[J]. Laser & Optoelectronics Progress, 2022, 59(10): 1015012
- Laser & Optoelectronics Progress
- Vol. 59, Issue 10, 1015012 (2022)
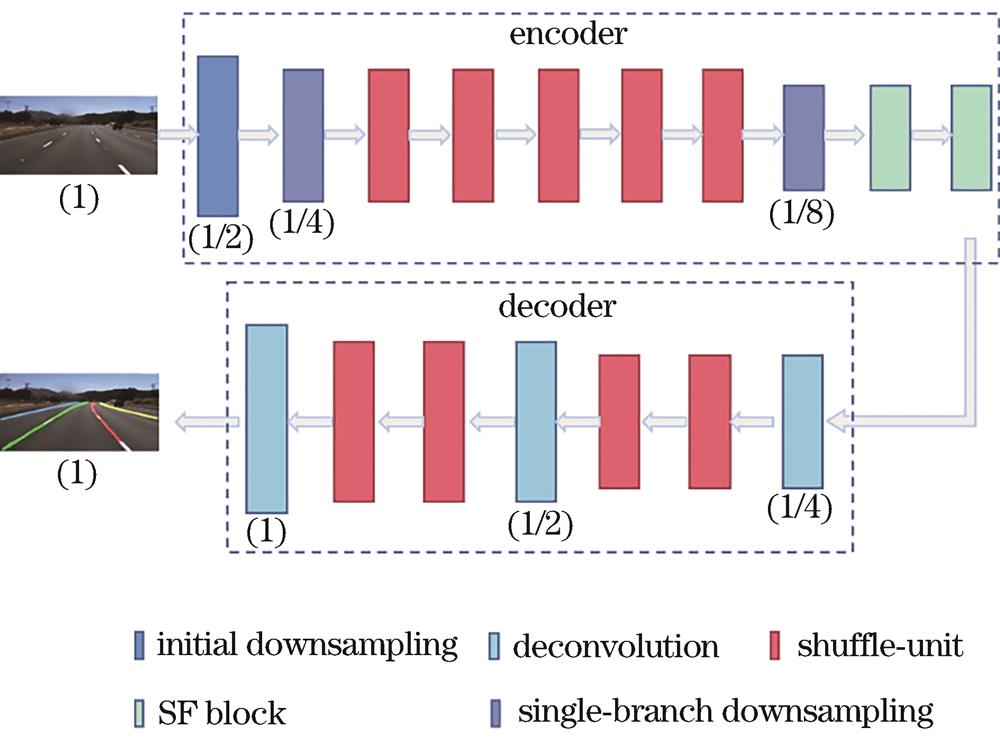
Fig. 1. ERFNet-LW network structure
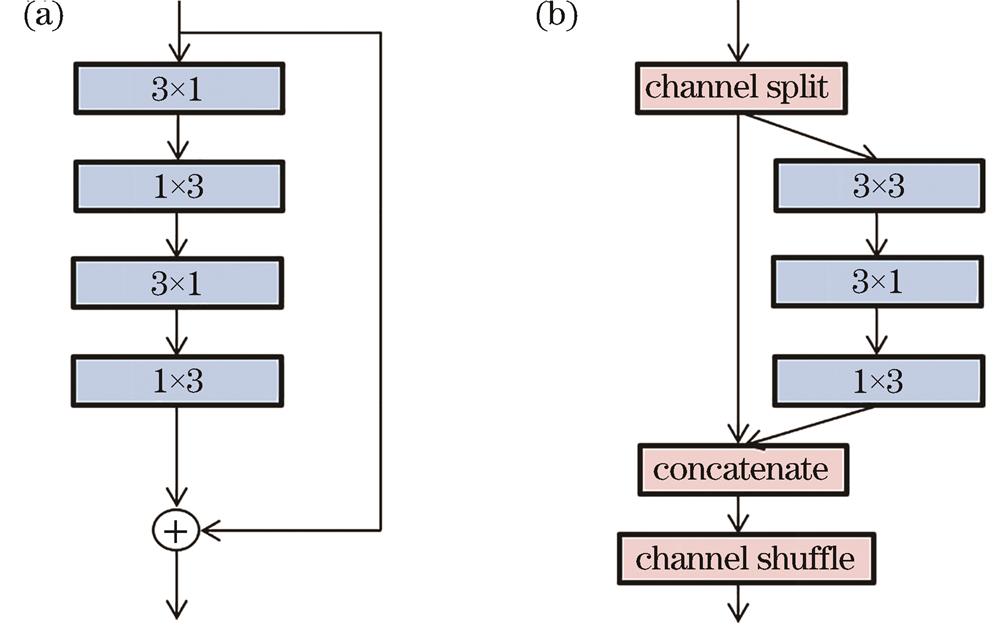
Fig. 2. Comparison of core module structure. (a) Non-bottleneck-1D; (b) shuffle-unit
Fig. 3. Downsampling structure. (a) Initial downsampling;
Fig. 4. Feature fusion module
Fig. 5. Dataset distribution
Fig. 6. Evaluation based on IoU. (a) Scene 1; (b) scene 2
Fig. 7. Visualization of CULane test sets. (a) Original image; (b) predicted results
|
Table 1. Network architecture of ERFNet
|
Table 2. Comparison of model indicators
|
Table 3. Comparison of F1-measure on the CULane dataset with IoU of 0.5 before and after the downsampling optimization of the model
|
Table 4. Comparison of F1-measure for different algorithms on CULane dataset with IoU of 0.5
|
Table 5. Comparison of parameters and runtime of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20