
Zeqiang YUAN, Yuzhang GU, Shoumeng QIU, Xiaolin ZHANG. Calibration and Target Position of Bionic Curved Compound Eye Composed of Multiple Cameras[J]. Acta Photonica Sinica, 2021, 50(9): 0911005
- Acta Photonica Sinica
- Vol. 50, Issue 9, 0911005 (2021)
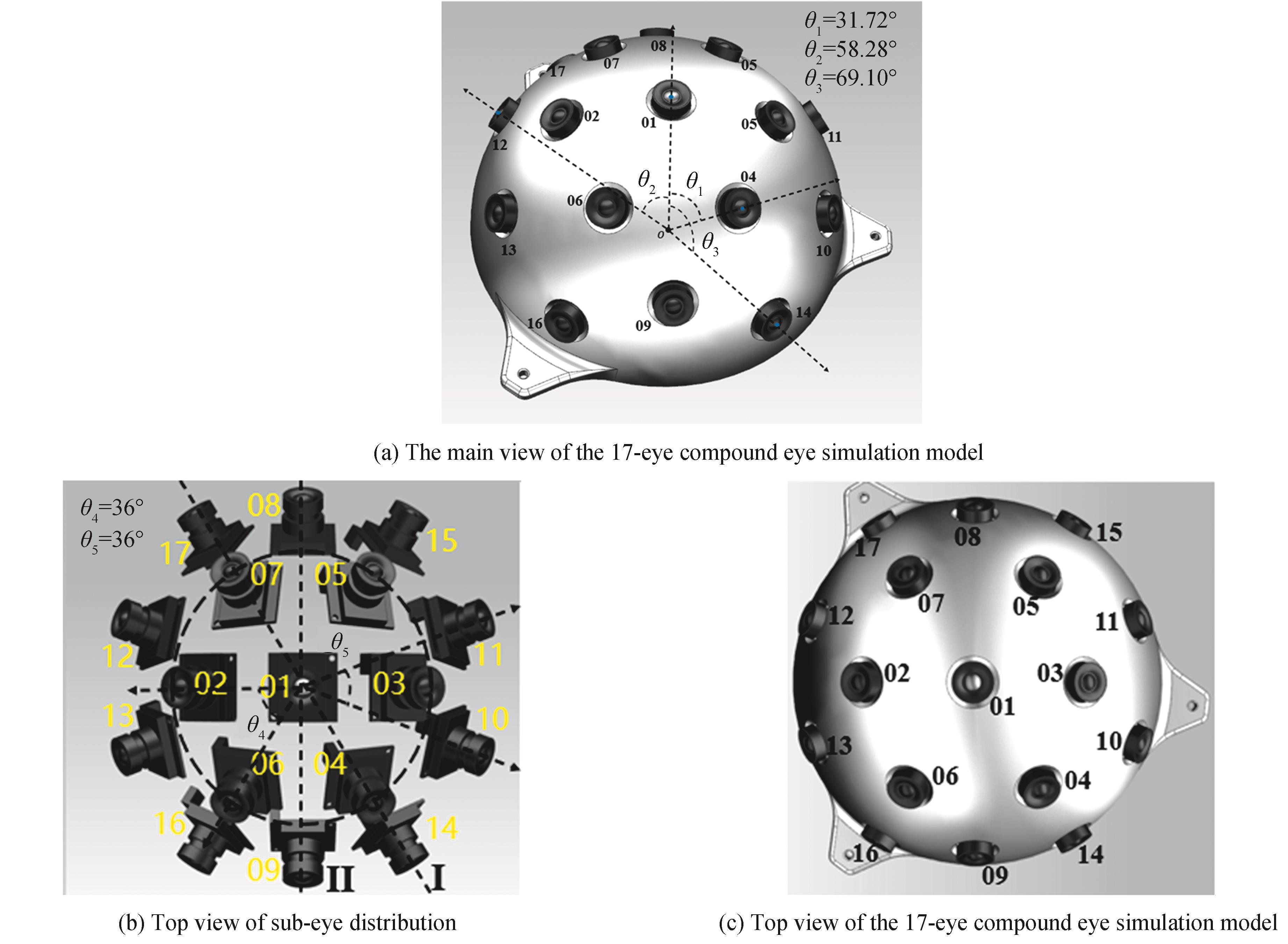
Fig. 1. Sub-eye arrangement
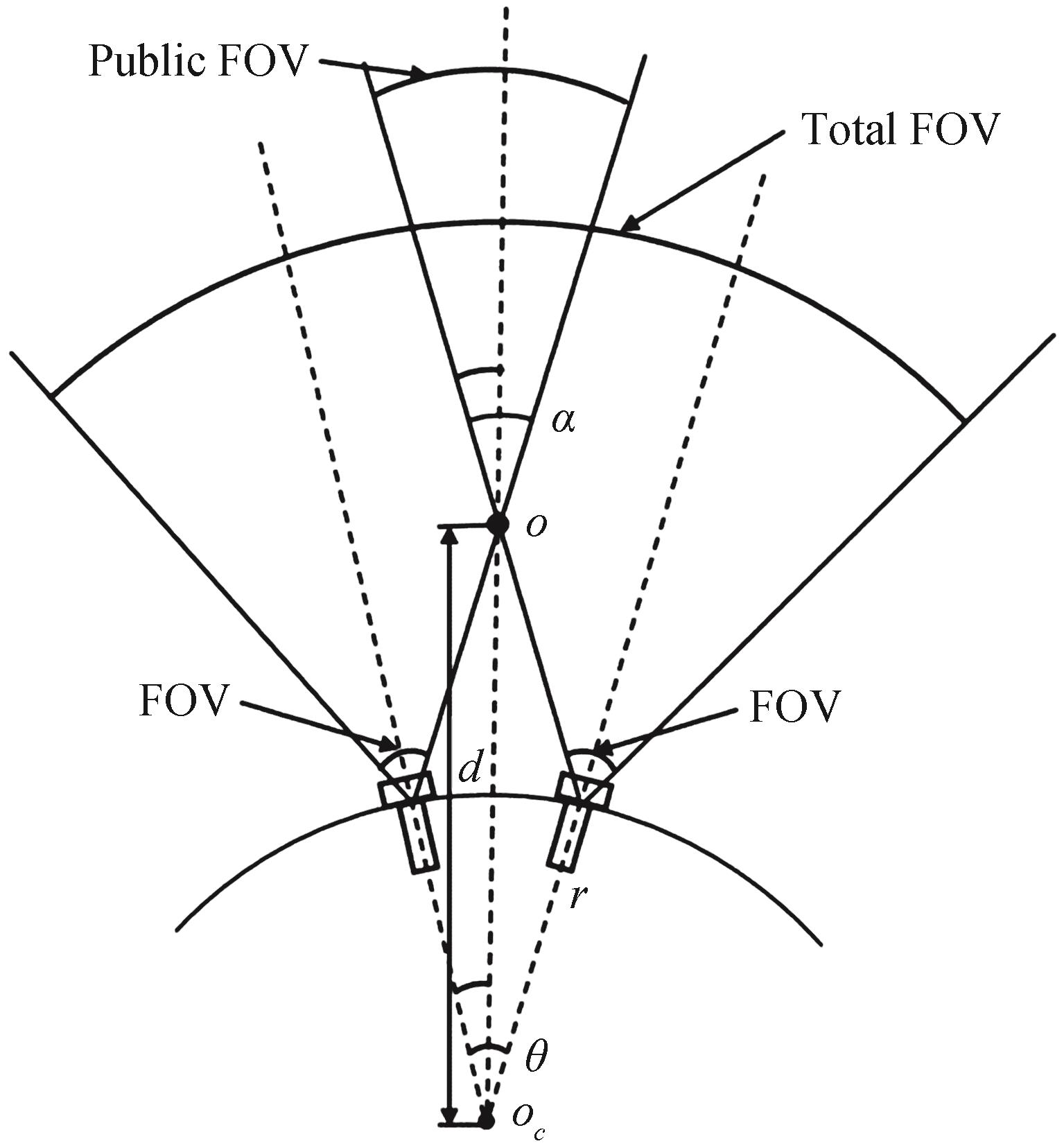
Fig. 2. Schematic diagram of the common field of view and total field of view of two sub-eyes arranged on the same spherical surface
Fig. 3. 17 eyes bionic curved compound eye prototype
Fig. 4. Diagram of compound eye target position
Fig. 5. Establishment of compound eye coordinate system
Fig. 6. Schematic diagram of the calibration of No. 02 sub-eye
Fig. 7. Diagram of calibration between adjacent subeyes of compound eye
Fig. 8. Distance measured experiment of points
Fig. 9. Theoretical and measured value comparison of L 1 ![]()
![]()
L 2 ![]()
![]()
Fig. 10. Positioning accuracy measurement platform of compound eye
Fig. 11. RANSAC-ORB feature matching of sub-eye images 01 and 06 after distortion correction
Fig. 12. RANSAC-ORB feature matching of sub-eye images 13 and 12 after distortion correction
|
Table 1. The three-dimensional coordinates of the center of the sub-eye lens on the spherical surface
|
Table 2. Intrinsic parameters of some sub eyes
|
Table 3. External parameters between some adjacent subeyes
|
Table 4. External parameters of some outermost subeyes relative to the central subeye
|
Table 5. 9-point’s Y coordinate measurement results (actual depth direction)
|
Table 6. Measurement results and errors of rail positioning experiment 1
|
Table 7. Measurement results and errors of rail positioning experiment 2

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20