
Zhilin Lin, Guoliang Zhang, Erliang Yao, Hui Xu. Stereo Visual Odometry Based on Motion Object Detection in the Dynamic Scene[J]. Acta Optica Sinica, 2017, 37(11): 1115001
- Acta Optica Sinica
- Vol. 37, Issue 11, 1115001 (2017)
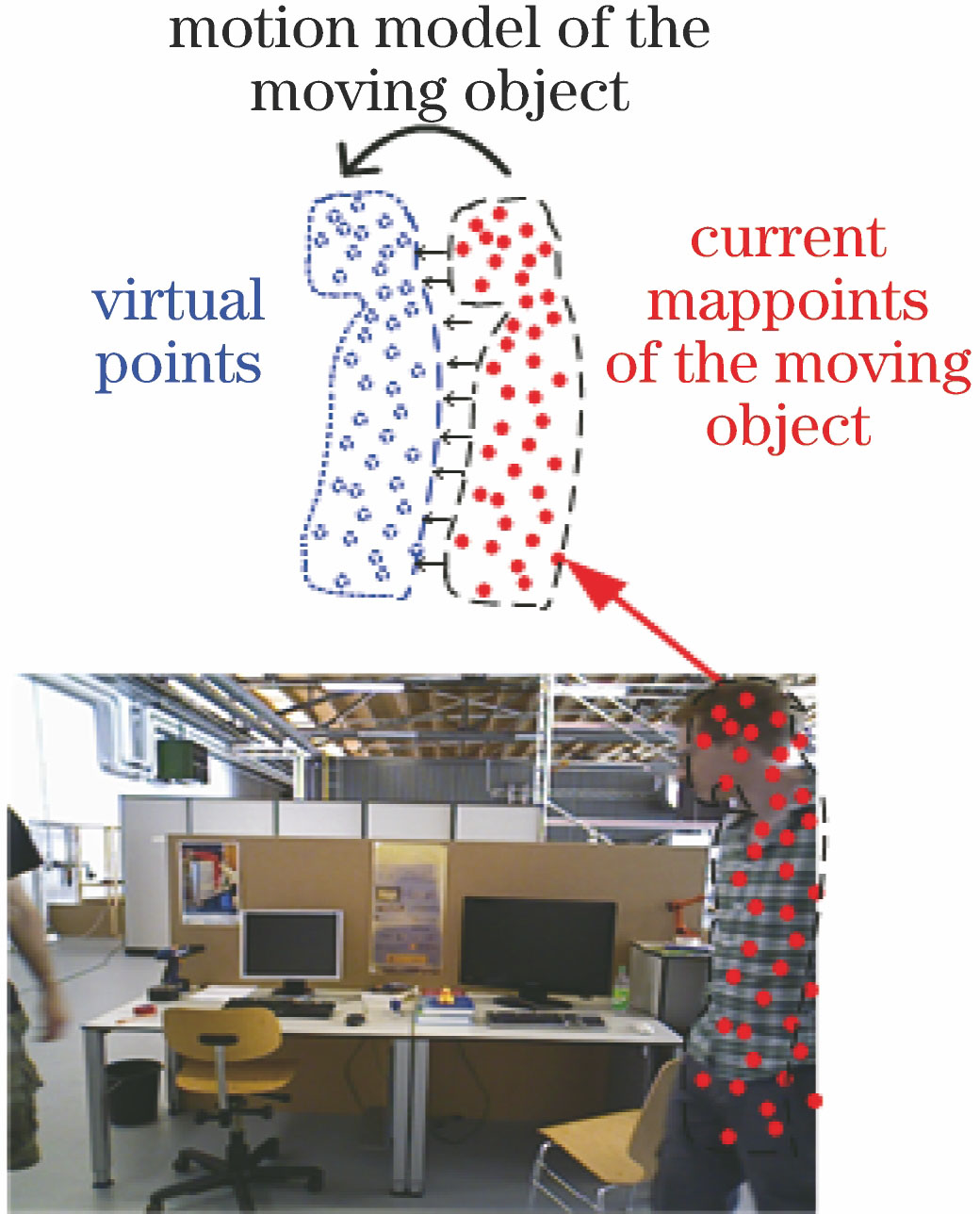
Fig. 1. Schematic of generating the virtual map points
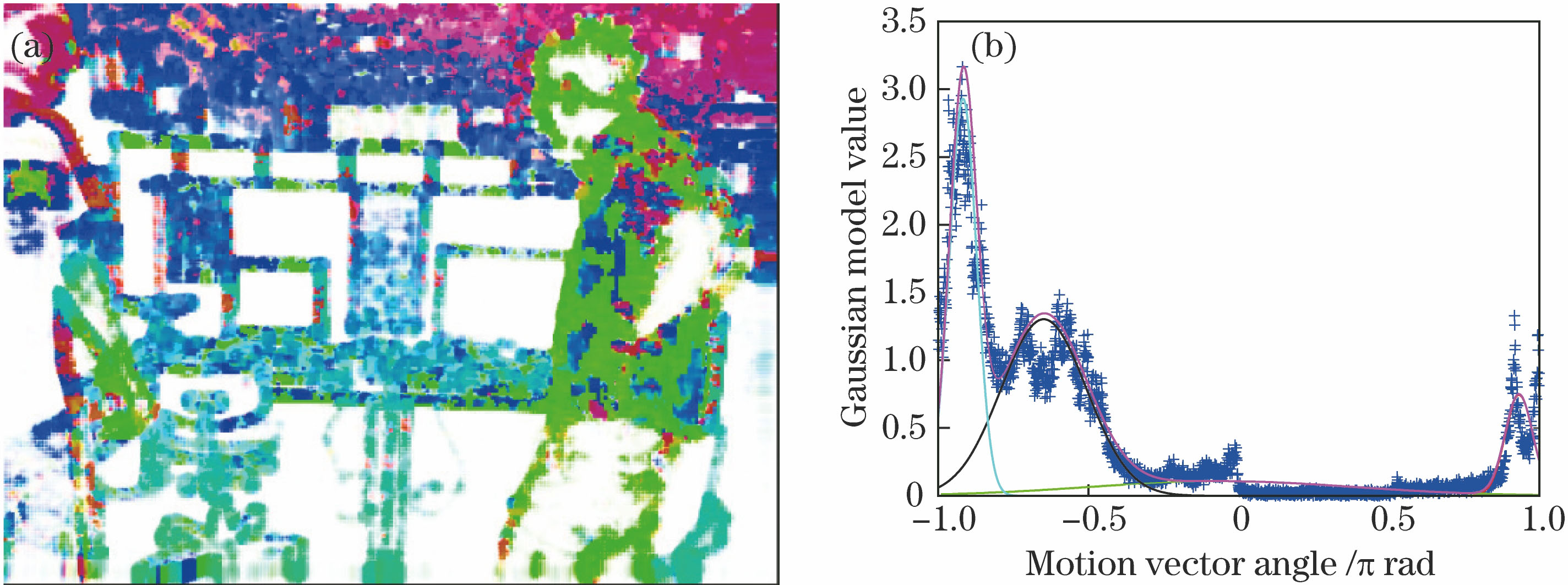
Fig. 2. (a) Schematic of the object motion vector angle; (b) corresponding result of GMM
Fig. 3. Diagram of the algorithm
Fig. 4. Results of motion object detection
Fig. 5. Schematic of local map
Fig. 6. Results of the contrast experiment on TUM dataset
Fig. 7. Bumblebee2 stereo camera
Fig. 8. Route of the moving person
Fig. 9. Results of online experiment based on ORB-SLAM2 method. (a) Estimated trajectory of camera; (b) error of the estimated position of camera; (c)-(h) image frames and poses of camera corresponding to position A-F
Fig. 10. Results of online experiment based on proposed algorithm. (a) Estimated trajectory of camera; (b) error of the estimated position of camera; (c)-(h) image frames and poses of camera corresponding to position A-F
|
Table 1. Run time of the contrast experiments on dataset
|
Table 2. Results of the contrast experiment

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20