
Chengyang Hu, Honghao Huang, Minghua Chen, Sigang Yang, Hongwei Chen. FourierCam: a camera for video spectrum acquisition in a single shot[J]. Photonics Research, 2021, 9(5): 701
- Photonics Research
- Vol. 9, Issue 5, 701 (2021)
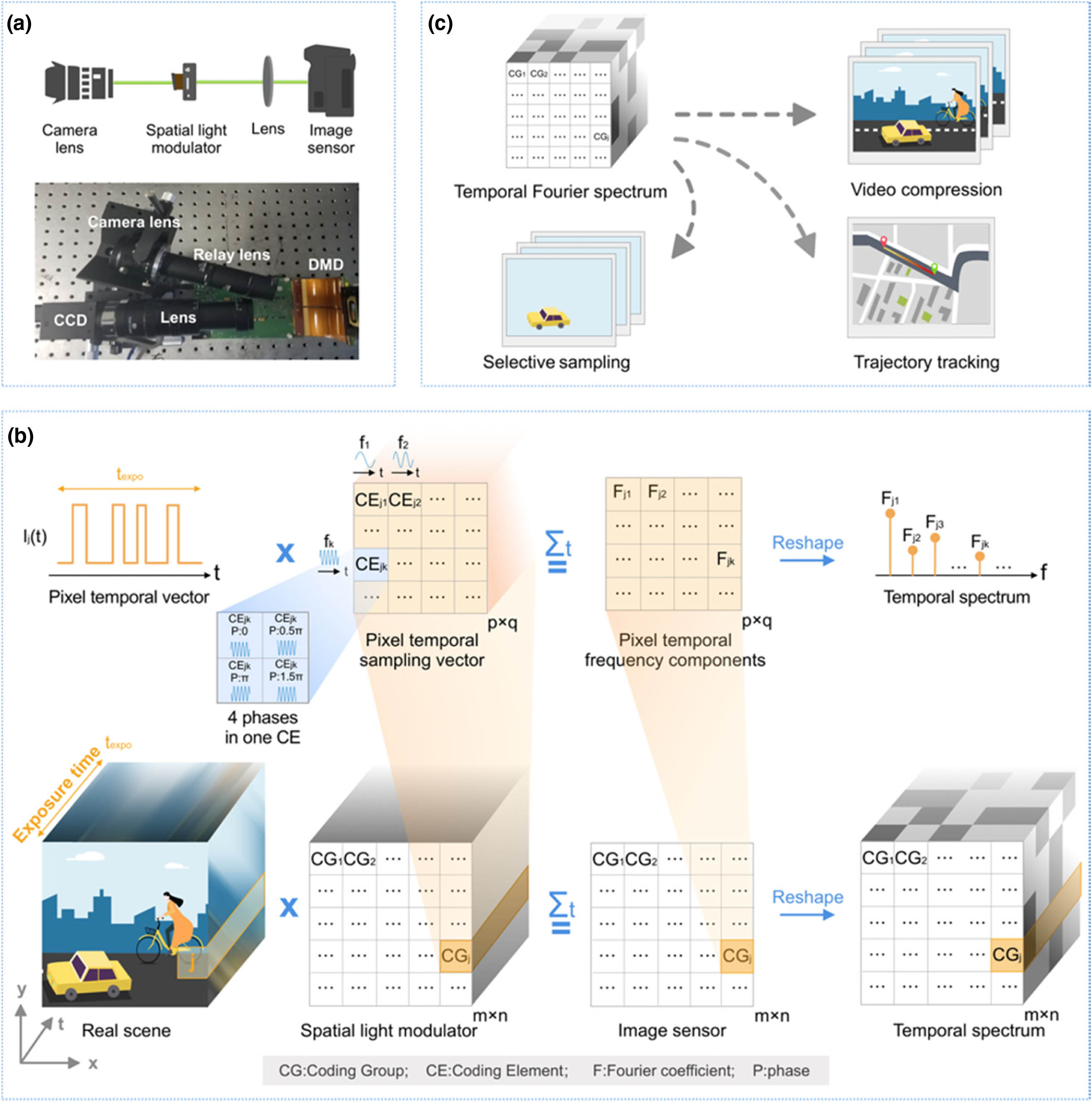
Fig. 1. Overview of FourierCam. (a) Schematic and prototype of FourierCam. (b) Coding strategy of FourierCam. The real scene is coded by a spatial light modulator (DMD) and integrated during a single exposure of the image sensor. The DMD is spatially divided into coding groups (5 × 5 4 × 4
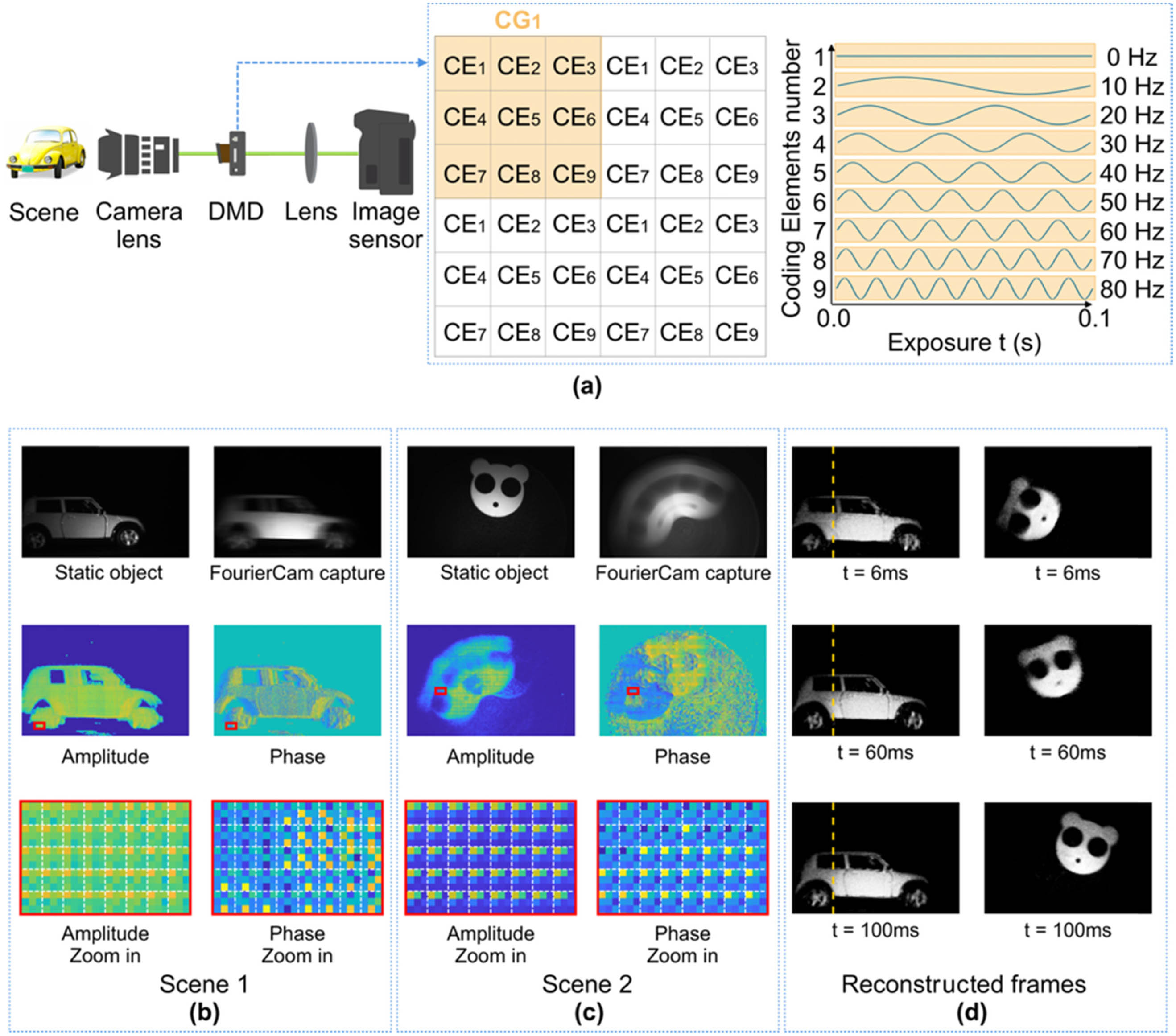
Fig. 2. Capturing aperiodic motion video using FourierCam. (a) Illustration of experiment setup and coding pattern on DMD. Each CG contains nine CEs (3 × 3
Fig. 3. Capturing periodic motion video using FourierCam. (a) To capture a periodic motion with four frequencies, each CG contains four CEs (2 × 2
Fig. 4. Object extraction by FourierCam. (a) Illustration of object extraction. The coding frequencies are based on the spectrum of the objects of interest. In this demonstration, the four rings on the disk are regarded as four objects of interest. Each ring only contains one frequency so that one CE is used in one CG. (b) Left: reference static scene with a disk and a poker card. The disk is rotating when capturing, and the four rings share the same rotating speed. Four right columns: FourierCam captured data for four rings extraction and corresponding results. For each extracted ring, other rings and static poker card are neglected. (c) Results for two identical rings rotating at different speed (1980 and 800 r/min, respectively). FourierCam enables extraction of a specific one out of these two rings.
Fig. 5. Moving object detection and tracking by FourierCam. (a) Only one frequency is needed to encode the scene for moving object detection and tracking. The period of sinusoidal coding signal is equal to the exposure time. Thus, only one CE is contained in each CG. (b) Coded data captured by FourierCam and tracking results. Left column: characters ‘T’, ’H’, ‘U’, ‘EE’ sequentially displayed by a screen with a 0.25 s duration for each. The color indicates the distribution of appearing time. Middle column: results for a displayed spot moving along a heart-shaped trajectory. Right column: results for two spots moving in circular trajectories with different radii. The spots are printed on a rotating disk driven by a motor.
Fig. 6. Phase analysis of the moiré fringe pattern obtained by the phase-shifting moiré method. (a) There are two errors: mismatch and misalignment. (b) Only mismatch error. (c) FourierCam with high-precision correspondence.
Fig. 7. Simulation of FourierCam video reconstruction. (a) Long exposure capture with all frames directly accumulating together, corresponding to a slow camera and the FourierCam encoded capture. The insets show the zoom-in view of the areas pointed by the arrows. (b) In the reconstructed video with 16 Fourier coefficients, the SSIM of each frame keeps stable with an average of 0.9126 and a standard deviation of 0.0107. (c) Three exemplar frames from the ground truth and reconstructed video.
Fig. 8. Quantitative analysis on the performance of FourierCam. (a) Relation between number of acquired Fourier coefficients h L of FourierCam. (b) Comparison of reconstructed frames with different numbers of acquired Fourier coefficients, corresponding to point 1 to point 4 in (a).
Fig. 9. Fourier domain properties of periodic and aperiodic signals. The (a) periodic signal has a (b) sparse spectrum while the (c) aperiodic signal has a (d) continuous spectrum.
Fig. 10. Illustration of Fourier domain properties of moving objects with different texture and speed. (a) Block with sinusoidal fringe texture moving at a speed of v v v .
|
Table 1. Comparison Between Different Application for FourierCam

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20