
Yanpeng Zhang, Dongya Zhu, Junmin Ma, Nan Meng. Subway Train Positioning Based on Monocular Vision and Optical Camera Communication[J]. Laser & Optoelectronics Progress, 2022, 59(16): 1606001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 16, 1606001 (2022)
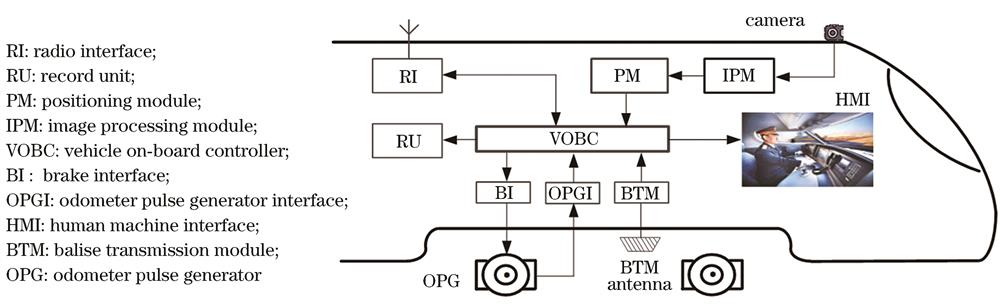
Fig. 1. Subway train positioning system based on OCC
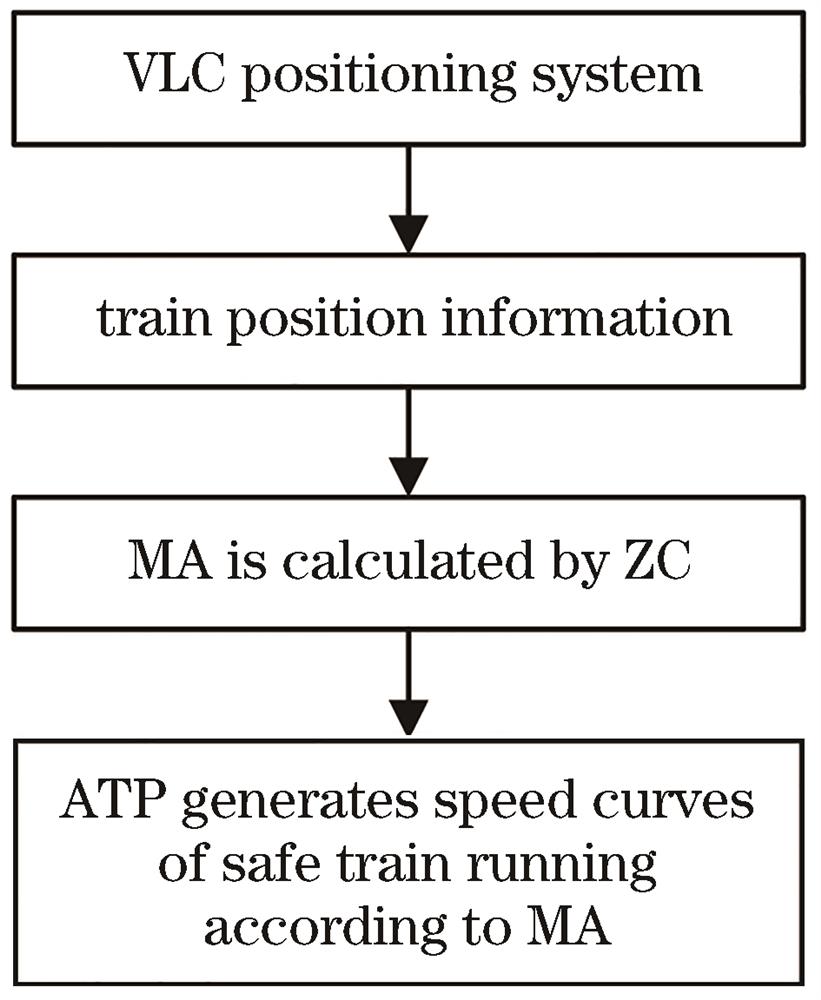
Fig. 2. Functions of the OCC positioning system
Fig. 3. Principle of generating MA
Fig. 4. Subway tunnel scenario with fast train running
Fig. 5. Train positioning in the scenario of arch tunnel
Fig. 6. Structure of the sending data frame
Fig. 7. Forming principle of images with bright and dark stripes. (a) Principle of the progressive exposure of camera line by lin; (b) images with bright and dark stripes
Fig. 8. Structure of the train positioning system based on OCC
Fig. 9. Principle of the keyhole imaging
Fig. 10. Projection of LED lamps on the imaging plane
Fig. 11. Projection model of LED lamps under the titled conditions
Fig. 12. Solving principle of the subtense AB
Fig. 13. Experimental environment and equipment. (a) Experimental environment; (b) experimental equipment
Fig. 14. Changing principle of the field of view
Fig. 15. Schematic diagram of the train positioning unit
Fig. 16. Experiment results. (a) Experiment results in the positioning unit; (b) experiment results for different camera positions and postures; (c) experiment results at different heights
Fig. 17. Simulation results when the train is running. (a) Simulation results; (b) positioning error
|
Table 1. Simulation parameters

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20