
Li Renzhong, Yang Man, Ran Yuan, Zhang Huanhuan, Jing Junfeng, Li Pengfei. Point Cloud Denoising and Simplification Algorithm Based on Method Library[J]. Laser & Optoelectronics Progress, 2018, 55(1): 11008
- Laser & Optoelectronics Progress
- Vol. 55, Issue 1, 11008 (2018)
Objectives: The acquisition of 3D point cloud data is seriously affected by the scanning equipment’s accuracy, the measured object’ environment, and the operator's experience, so various noise points in 3D point cloud model inevitably exist. With the increase of useless noise points in the point cloud model, computer storage and display occupy large memory, process long time, which will inevitably seriously affect the reconstruction precision and reconstruction efficiency. Therefore, a denoising and simplification algorithm based on method library of the passthrough filter, the statistical filter, the radius filter, the improved bilateral filter and the voxel grid filter is proposed.
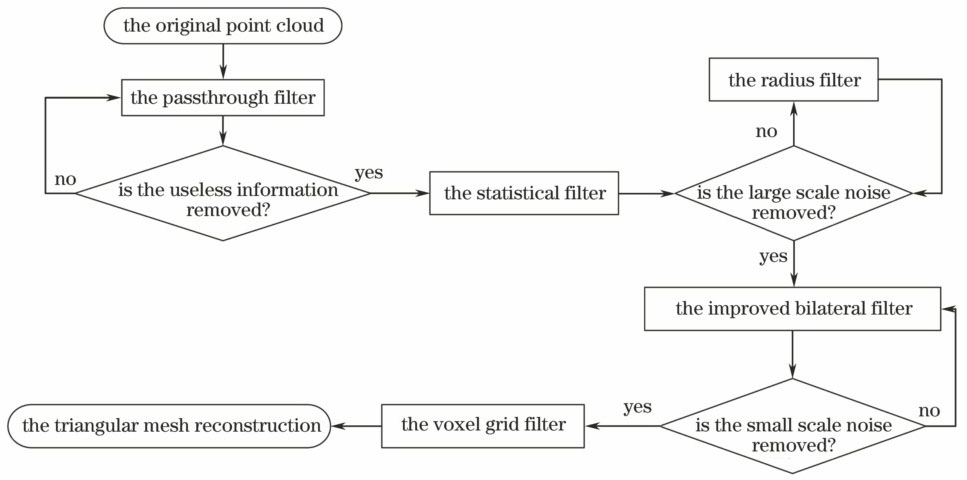
Methods: The noise points surrounding the point cloud model are often irregularly distributed around the model main body, so it is difficult to distinguish them with a unified mathematical model. Firstly, the noise points around the point cloud model are divided into large-scale noise points and small-scale noise points. Large-scale noise points refer to the wrong points that have little correlation with the point cloud model main body or are far away from the center of the point cloud model main body. Small-scale noise points refer to those surface points associated with the point cloud model main boby’s surface or mixed with the point cloud model’s real points. In order to reduce the influence of different scales noise points on the point cloud model reconstruction and improve the reconstruction accuracy, the main steps of the algorithm are as follows: 1) passthrough filter: segmentation of the target. Remove the useless information around the point cloud and segment the target point cloud. 2) Statistical filter combined with radius filter: remove large-scale noise points. First, the result of the passthrough filter segmentation is treated as the input point cloud, and the statistical filter is used for the first denoising, which can remove most of the large-scale noise points, then the radius filter is used for the second denoising, which is conducive to the removal of the remaining large-scale noise points. 3) Improved bilateral filter: remove some small-scale noise points. On the basis of large-scale noise removal, the improved bilateral filter is used to correct and smooth small-scale noise points. 4) Voxel grid filter: uniform simplification. In order to reduce the impact of the amount of point cloud data on computer memory and improve the efficiency of point cloud reconstruction, voxel grid filter is used for uniform simplification. 5) Triangular mesh face reconstruction: surface reconstruction. The denoising and simplification results is evaluated by the similarity between the reconstructed point cloud model surface and the original model surface.
Results: The collected original point cloud data is treated as the research object, there are various noise points around the original point cloud model. After the point cloud model is processed by the passthrough filter, the scattered noise points far away from the point cloud model body is removed, and the target point cloud model is segmented. After the point cloud model is processed by the statistical filter and radius filter, the large-scale noise points that deviate from the point cloud model main body are basically removed, and only leaving some small-scale noise points adhered to the point cloud model surface. Small-scale noise points, which adhere to the point cloud model surface, are also secondary removed by the improved bilateral filter, and the relatively smoothing point cloud model is obtained. In order to reduce the burden of computer memory and improve the speed of program execution, after the point cloud model is processed by voxel grid filter, the number of points of the point cloud model becomes significantly sparse, and the simplification is more uniform without destroying the original model’s geometric characteristics. The lighter color of the point cloud model indicates the reduction of the amount of point cloud data. Finally, after the point cloud model is processed by the triangular mesh reconstruction surface, the inherent morphology of the point cloud model is displayed. The reconstructed model’s texture is close to the original model’s surface. In addition, in order to verify the algorithm’s feasibility and main advantages, in terms of subjective visual effect, various noise points in point cloud model are removed via this method and ultimately a 3D point cloud model with smooth surface is obtained; in terms of objective evaluation index, the running time of the algorithm’s each module is closely related to the number of the point cloud model’s points. Generally speaking, the more the point cloud model’s points is, the longer the program’s running time is, the more the point cloud model’s points are reduced.
Conclusions: The algorithm can effectively remove the different scales noise points in the point cloud model, and has a certain fast smoothing effect on the point cloud model. Without destroying the geometry structure of the point cloud model itself, it can effectively filter out part of the point cloud data redundancy, achieve the purpose of uniform simplification of the point cloud model, and show the effect of the processed point cloud model with the triangular mesh reconstruct surface. The algorithm is simple in principle and efficient in execution. It overcomes the problems of too much redundancy, too long reconstruction time and too low efficiency of 3D point cloud data, improves the accuracy and efficiency of 3D human body reconstruction, and has a certain practical value in the field of point cloud reconstruction.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20