
Li Renzhong, Yang Man, Ran Yuan, Zhang Huanhuan, Jing Junfeng, Li Pengfei. Point Cloud Denoising and Simplification Algorithm Based on Method Library[J]. Laser & Optoelectronics Progress, 2018, 55(1): 11008
- Laser & Optoelectronics Progress
- Vol. 55, Issue 1, 11008 (2018)
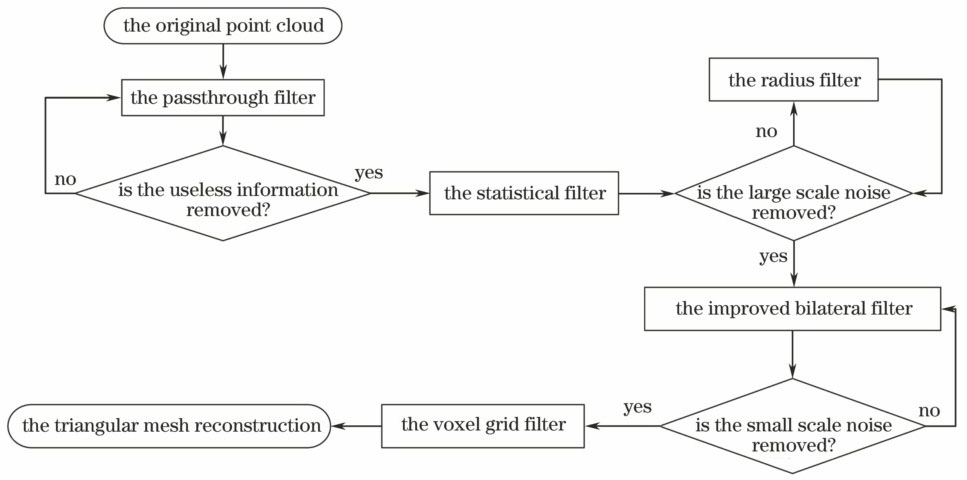
Fig. 1. Flow chart of the proposed algorithm
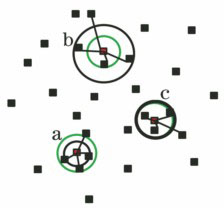
Fig. 2. Principle sketch map of the statistical filter
Fig. 3. Principle sketch map of the radius filter
Fig. 4. Schematic of k-neighbors voxel grid simplification[13]
Fig. 5. Schematic of triangular mesh reconstruction[13]
Fig. 6. Test results of 45° human point cloud model using the proposed algorithm. (a) Original point cloud; (b) large scale denoising; (c) small scale denoising; (d) uniform simplification; (e) reconstruction
Fig. 7. Test results of 180° human point cloud model using the proposed algorithm. (a) Original point cloud; (b) large scale denoising; (c) small scale denoising; (d) uniform simplification; (e) reconstruction
Fig. 8. Test results of self point cloud model using the proposed algorithm. (a) Original point cloud; (b) large scale denoising; (c) small scale denoising; (d) uniform simplification; (e) reconstruction
|
Table 1. Running time of each program module and variations of the point number of the point cloud

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20