
Qiqi Song, Xiaoli Li, Wei Zuo, Lipeng Gu. Parallel Correlation Filter Tracking Algorithm Based on Response Map Confidence[J]. Laser & Optoelectronics Progress, 2020, 57(20): 201017
- Laser & Optoelectronics Progress
- Vol. 57, Issue 20, 201017 (2020)
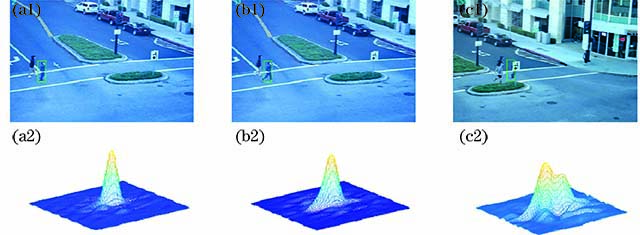
Fig. 1. Result when the trace fails. (a1)-(c1) Images of different frames; (a2)-(c2) corresponding response images
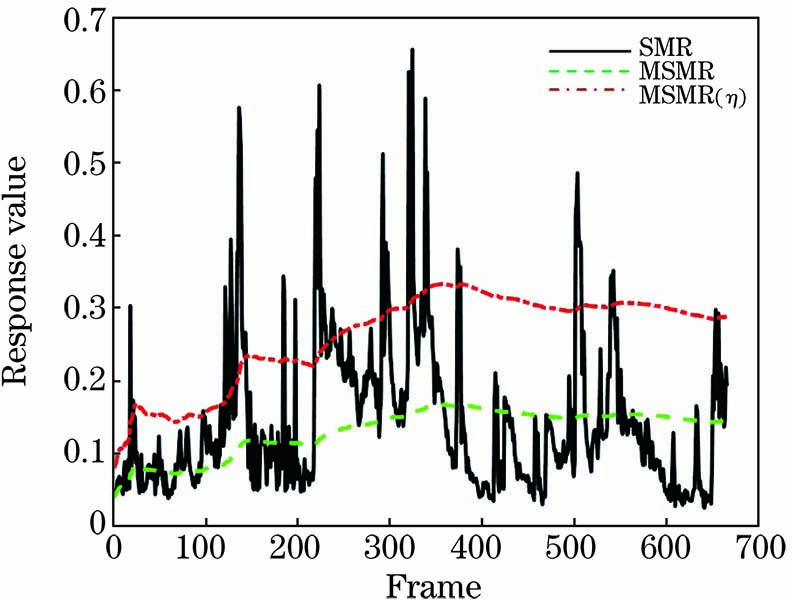
Fig. 2. Change curves of the three indicators of the Human4 sequence
Fig. 3. OPE of different algorithms on the OTB-2015 dataset. (a) Success rate; (b) precision
Fig. 4. Tracking effect of different algorithms on the OTB-2015 dataset. (a) Coke; (b) bolt
Fig. 5. Test results of different algorithms. (a) OPE success rate (OTB-2013 dataset); (b) OPE precision (OTB-2013dataset); (c) OPE success rate (OTB-2015 dataset); (d) OPE precision (OTB-2015) dataset)
Fig. 6. Tracking results of different algorithms. (a) BlurOwl; (b) Diving; (c) Walking2; (d) Couple
Fig. 7. Case of target tracking failure. (a) Bird1; (b) Biker
|
Table 1. Success rate of 10 algorithms in the OTB-2015 dataset unit: %
|
Table 2. Precision of 10 algorithms on the OTB-2015 dataset unit:%

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20