
Fanran Meng, Wenxiang Zhang, Xiaojun Liu, Fei Liu, Xian Zhou, "Comparative analysis of temporal-spatial and time-frequency features for pattern recognition of φ-OTDR," Chin. Opt. Lett. 21, 040601 (2023)
- Chinese Optics Letters
- Vol. 21, Issue 4, 040601 (2023)
Abstract
Keywords
1. Introduction
Distributed acoustic or vibration sensors (DASs/DVSs) have been widely used in perimeter security[1], pipeline safety alarm[2,3], structure-health monitoring[4], and traffic control[5], due to their advantages, including simple structure, accurate positioning ability, and ultralong sensing range for disturbance detection. To date, only the disturbance location no longer meets the requirements under complex and various scenarios, where the identification of disturbance signals should be resolved for future investigation or application[6]. Utilizing the backscattered signals and coherent detection, researchers can simultaneously obtain the time, space, and frequency feature of disturbance signals imposed on optical fibers[7–11] via the phase-sensitive time-domain reflectometer (
In addition, researchers pay attention not only to time-frequency features but also to temporal-spatial features of signals. Wang et al.[23] proposed a method based on the deep dual-path network and a time spectrum for
Sign up for Chinese Optics Letters TOC. Get the latest issue of Chinese Optics Letters delivered right to you!Sign up now
In this paper, the image processing and STFT technology are used to extract disturbance information in the time domain, the frequency domain, and the space domain. We use a CNN to train and classify the data. The experiment results show that the temporal-spatial image can achieve 99.56% classification accuracy on three kinds of events with 3600 sample data sets, whereas the time-frequency image achieves 98.23%. Since the extraction of temporal-spatial features does not require accurate location, the signals can be directly converted into images, and CNN can directly extract temporal-spatial features. However, when extracting time-frequency features through STFT, it is necessary to identify the exact location of the vibration event, leading to some errors in the positioning process. In this study, the results of pattern recognition of temporal-spatial and time-frequency features are compared and analyzed from several aspects, which provides reference value for the feature extraction method in
The rest of this paper is structured as follows. Section 2 introduces the process of data acquisition and processing, including experimental settings, data processing methods, data set composition, and pattern recognition methods. In Section 3, two methods of pattern recognition are compared and analyzed by experiments. Thus, it is proved that the classification effect of temporal-spatial images is better than that of time-frequency images. Finally, Section 4 summarizes the paper.
2. Data Acquisition and Processing
2.1. Experimental setup
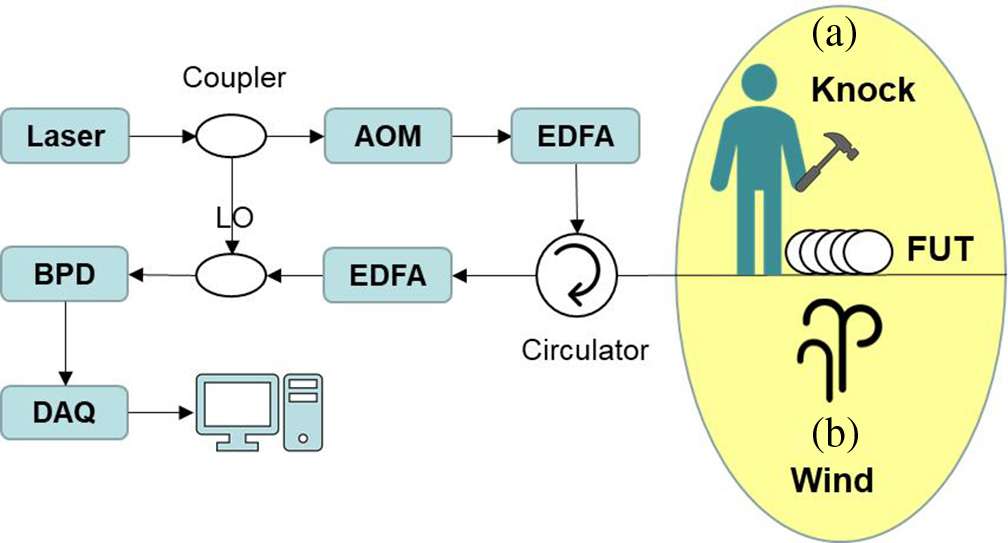
The setup of the involved
![]()
Figure 1.Experimental setup of φ-OTDR. (a) Knocking with a hammer; (b) wind blowing. AOM, acoustic-optic modulator; EDFA, erbium-doped fiber amplifier; LO, local oscillator; BPD, balanced photodetector; DAQ, data acquisition card.
![]()
Figure 2.(a) Developed prototype φ-OTDR instrument; (b) deployed fiber in the experiment.
2.2. Data set processing
When the vibration signal is applied to the fiber, the phase of the Rayleigh backscattering (RBS) signal in the disturbed region is modulated accordingly. The RBS signal after the disturbance can be expressed as
![]()
Figure 3.Flow chart of DSP.
Then STFT is performed on the obtained disturbed signal to obtain the time-frequency diagram[18]. The basic calculation is
After selecting the STFT window function, the resolution is fixed when the window length function is determined. Since the time resolution is inversely proportional to the frequency resolution, they cannot be optimized simultaneously. Therefore, choosing the appropriate window function type and reasonable window length is vital. Here we use the Hanning window function to intercept the signal to guarantee fine-frequency resolution and less spectrum leakage. Its expression can be written as
2.3. Data set preparation
The data set greatly influences the recognition performance, and a reasonable data set structure is crucial for pattern recognition. Common vibration signals include mechanical activity, walking, wind blowing, rain, knocking, shaking, etc. In this paper, three typical event types, i.e., background noise, knocking, and wind blowing, are selected. The knock signal is obtained by striking with a hammer. A fan generates the wind blowing signal to simulate the natural wind blowing in the virtual environment. Background noise is obtained when the ambient environment is relatively quiet without any vibration event. The composition of the data set is shown in Table 1. The time-domain waveforms of different vibration events are presented in Fig. 4.
![]()
Figure 4.Time-domain waveform of vibration signal. (a) Knock around the fiber with a hammer; (b) wind blowing; (c) background noise.
| Event Type | Knocking | Blowing | Noise |
|---|---|---|---|
| Temporal-spatial training set | 599 | 804 | 888 |
| Temporal-spatial validation set | 421 | 396 | 312 |
| Total | 1020 | 1200 | 1200 |
| Time-frequency training set | 845 | 804 | 641 |
| Time-frequency validation set | 355 | 396 | 379 |
| Total | 1200 | 1200 | 1020 |
Table 1. Composition of the Data Set
We have selected a range of 10 m in the spatial neighborhood of the vibration signal. Each temporal-spatial image represents a spatial length of 10 m and a temporal length of 1 s, shown in Figs. 5(a)–5(c), where the unit on the color bars is the radian (the unit of phase). The vertical and horizontal direction of the temporal-spatial image represents position and time, respectively. The time duration of time-frequency images is 1 s, which is shown in Figs. 5(d)–5(f). For the time-frequency image, the horizontal axis presents time too, whereas the vertical axis presents frequency. The unit of the color bars in Figs. 5(d)–5(f) is the decibel, where 0 dB refers to the maximum value of the whole spectrum along the position.
![]()
Figure 5.Temporal-spatial image and time-frequency image for vibration events. (a), (d) Knock around the fiber with a hammer; (b), (e) wind blowing; (c), (f) background noise.
2.4. Pattern recognition method
Deep-learning methods such as CNN can automatically learn the features of data sets. ResNet50 has a deep network level and few parameters, achieving good results in image data sets in other fields. Consequently, it is applied to
![]()
Figure 6.Network structure of ResNet50.
![]()
Figure 7.Residual blocks of ResNet50.
3. Experimental Results and Analysis
Here, the ResNet50 classifier is used to train and validate the temporal-spatial and time-frequency images, respectively, and the cross-validation method is used to evaluate the classification results. The learning rate is set as 0.003. In deep learning, the principle of small-batch data processing is generally adopted. The batch size is 25, and the training epoch is 100. We collected 1200 sets of three signals: knock around the fiber with a hammer, the wind blowing optical fiber, and background noise. The ratio of the training set and validation set is 7:3. The loss and accuracy are obtained with each iteration, and the hyperparameters are changed to optimize the next training. Each network is tested in the test phase every 100 iterations. The resultant training loss and validation accuracy curves are shown in Fig. 8.
![]()
Figure 8.(a) Classification accuracy curve and (b) loss curve of training.
During the training on time-frequency images, the training loss, representing the network error, decreases slowly after 50 epochs until it hovers around 0.03, and the best test accuracy is 98%. In contrast, the test accuracy of the temporal-spatial image is 99%, and the training loss reaches 0.01 after 30 epochs. The results show that the classification performance based on the temporal-spatial images is better. The classification results are shown in Table 2, which shows that classification accuracy based on the temporal-spatial images achieves 99.49%, whereas the classification accuracy based on time-frequency images is 98.23%. The accuracy of temporal-spatial images is 1.33% higher than that of the time-frequency images. From the average training time per step, the temporal-spatial map as input is improved by 3 s compared to the time-frequency map as input. However, from Table 3 it is clear that the recall and f1-score of the input time-frequency image reach 100%, indicating that the model has a better recognition effect on the time-frequency characteristics of continuous signals. The confusion matrices are shown in Fig. 9. The knocking signal is most easily confused compared with the other two types of signals, primarily based on time-frequency characteristics. A possible explanation is that the knock signal is a single point tapping signal that is transient in the time domain. There is a time difference between the two disturbance signals. The signal feature image will contain the interference information of the external environment.
![]()
Figure 9.Confusion matrix of (a) temporal-spatial image and (b) time-frequency image.
| Precision | Accuracy | Average Training Time/s | |||
|---|---|---|---|---|---|
| Knocking | Noise | Blowing | |||
| Temporal-spatial image | 99.64% | 98.98% | 99.98% | 99.49% | 219 |
| Time-frequency image | 95.51% | 99.18% | 98.19% | 98.23% | 216 |
Table 2. Comparison of Training Results between Temporal-Spatial and Time-Frequency Images
| Event Type | Recall | f1-Score | |
|---|---|---|---|
| Temporal-spatial | Knocking | 99.76% | 99.76% |
| Noise | 99.36% | 99.52% | |
| Blowing | 99.75% | 99.62% | |
| Time-frequency | Knocking | 99.15% | 97.50% |
| Noise | 96.04% | 97.59% | |
| Blowing | 100% | 100% | |
Table 3. Comparison of Recall and f1-Score
The experimental results show that the classification effect based on the temporal-spatial image is better than that of the time-frequency image. In preprocessing the two signals, the extraction of the temporal-spatial feature does not require precise positioning in advance. Taking the distance within the range of 20 m around the perturbation position, we have converted the signal of this distance into a temporal-spatial image. The temporal and spatial correlation of the signal is preserved, and the intensity information is extracted from the image. The temporal-spatial features are directly extracted by the CNN model, which avoids manual processing during the classification, thereby reducing the workload and retaining the features of the original signal. However, the time-frequency feature extracted by STFT must locate the disturbance signal. The time-frequency features extracted by STFT need to locate the disturbance signals and extract the signal features. In practical applications, most of the collected signals are discontinuous signals. Due to external disturbance, it is difficult to accurately extract target disturbance information, and there may be some information loss. Therefore, the extraction of time-frequency feature information is greatly affected by the environment, resulting in a slightly worse classification effect.
4. Conclusion
This paper compares and analyzes the disturbance events classification methods in
References
[1] H. Meng, S. Wang, C. Gao, F. Liu. Research on recognition method of railway perimeter intrusions based on Φ-OTDR optical fiber sensing technology. IEEE Sens. J., 21, 9852(2021).
[2] H. Wu, X. Liu, Y. Xiao, Y. Rao. A dynamic time sequence recognition and knowledge mining method based on the hidden Markov models (HMMs) for pipeline safety monitoring with Φ-OTDR. J. Light. Technol., 37, 4991(2019).
[3] H. Wu, J. Chen, X. Liu, Y. Xiao, M. Wang, Y. Zheng, Y. Rao. One-dimensional CNN-based intelligent recognition of vibrations in pipeline monitoring with DAS. J. Light. Technol., 37, 4359(2019).
[4] Y. Lu, T. Zhu, L. Chen, X. Bao. Distributed vibration sensor based on coherent detection of phase-OTDR. J. Light. Technol., 28, 3243(2010).
[5] Z. Wang, Z. Pan, Q. Ye, B. Lu, Z. Fang, H. Cai, R. Qu. Novel distributed passive vehicle tracking technology using phase sensitive optical time domain reflectometer. Chin. Opt. Lett., 13, 100603(2015).
[6] Y. Zhang, T. Zhou, Z. Ding, Y. Lu, X. Zhang, F. Wang, N. Zou. Classification of interference-fading tolerant Φ-OTDR signal using optimal peak-seeking and machine learning [Invited]. Chin. Opt. Lett., 19, 030601(2021).
[7] H. Jia, S. Lou, S. Liang, X. Sheng. Event identification by F-ELM model for ϕ-OTDR fiber-optic distributed disturbance sensor. IEEE Sens. J., 20, 1297(2020).
[8] H. Wu, B. Zhou, K. Zhu, C. Shang, H.-Y. Tam, C. Lu. Pattern recognition in distributed fiber-optic acoustic sensor using intensity and phase stacked convolutional neural network with data augmentation. Opt. Express, 29, 3269(2021).
[9] M. Aktas, T. Akgun, M. U. Demircin, D. Buyukaydin. Deep learning based multi-threat classification for phase-OTDR fiber optic distributed acoustic sensing applications. Proc. SPIE, 10208, 102080G(2017).
[10] Z. Wang, Z. Pan, Q. Ye, B. Lu, H. Cai, R. Qu, Z. Fang, H. Zhao. Vehicle tracking by φ-OTDR used in safety monitored areas. Opto-Electronics and Communications Conference (OECC), 1(2015).
[11] H. Liu, F. Pang, L. Lv, X. Mei, Y. Song, J. Chen, T. Wang. True phase measurement of distributed vibration sensors based on heterodyne φ-OTDR. IEEE Photon. J., 10, 7101309(2018).
[12] H. F. Taylor, C. E. Lee. Apparatus and method for fiber optic intrusion sensing. U.S. patent.
[13] X. Chen, C. Xu. Disturbance pattern recognition based on an ALSTM in a long-distance φ-OTDR sensing system. Microw. Opt. Technol. Lett., 62, 168(2019).
[14] M. Zhang, Y. Li, J. Chen, Y. Song, J. Zhang, M. Wang. Event detection method comparison for distributed acoustic sensors using φ-OTDR. Opt. Fiber Technol., 52, 101980(2019).
[15] H. Wu, M. Yang, S. Yang, H. Lu, C. Wang, Y. Rao. A novel DAS signal recognition method based on spatiotemporal information extraction with 1DCNNs-BiLSTM network. IEEE Access, 8, 119448(2020).
[16] D. He, C. Liu, Z. Jin, R. Ma, Y. Chen, S. Shan. Fault diagnosis of flywheel bearing based on parameter optimization variational mode decomposition energy entropy and deep learning. Energy, 239, 122108(2022).
[17] M. Aktas, T. Akgun, M. U. Demircin, D. Buyukaydin. Deep learning based threat classification in distributed acoustic sensing systems. 25th Signal Processing and Communications Applications Conference (SIU), 1(2017).
[18] C. Xu, J. Guan, M. Bao, J. Lu, W. Ye. Pattern recognition based on time-frequency analysis and convolutional neural networks for vibrational events in φ-OTDR. Opt. Eng., 57, 016103(2018).
[19] Y. Shi, Y. Li, Y. Zhang, Z. Zhuang, T. Jiang. An easy access method for event recognition of φ-OTDR sensing system based on transfer learning. J. Light. Technol., 39, 4548(2021).
[20] H. Wu, S. Xiao, X. Li, Z. Wang, J. Xu, Y. Rao. Separation and determination of the disturbing signals in phase-sensitive optical time domain reflectometry (Φ-OTDR). J. Light. Technol., 33, 3156(2015).
[21] Y. Wang, P. Wang, K. Ding, H. Li, J. Zhang, X. Liu, Q. Bai, D. Wang, B. Jin. Pattern recognition using relevant vector machine in optical fiber vibration sensing system. IEEE Access, 7, 5886(2019).
[22] Z. Wang, S. Lou, S. Liang, X. Sheng. Multi-class disturbance events recognition based on EMD and XGBoost in φ-OTDR. IEEE Access, 8, 63551(2020).
[23] Z. Wang, L. Li, H. Zheng, J. Liang, X. Wang, B. Lu, Q. Ye, H. Cai, R. Qu. Smart distributed acoustics/vibration sensing with dual path network. 26th International Conference on Optical Fiber Sensors, WF105(2018).
[24] Y. Shi, S. Dai, T. Jiang, Z. Fan. A recognition method for multi-radial-distance event of φ-OTDR system based on CNN. IEEE Access, 9, 143473(2021).
[25] Z. Wang, L. Zhang, S. Wang, N. Xue, F. Peng, M. Fan, W. Sun, X. Qian, J. Rao, Y. Rao. Coherent Φ-OTDR based on I/Q demodulation and homodyne detection. Opt. Express, 24, 853(2016).
[26] P. Khojasteh, L. A. Passos, T. Carvalho, E. Rezende, B. Aliahmad, J. P. Papa, D. K. Kumar. Exudate detection in fundus images using deeply-learnable features. Comput. Biol. Med., 104, 62(2019).
[27] A. S. B. Reddy, D. S. Juliet. Transfer learning with ResNet-50 for malaria cell-image classification. International Conference on Communication and Signal Processing (ICCSP), 945(2019).
[28] T. Zhou, X. Zhang, B. Kang, M. Chen. Multimodal fusion recognition for digital twin. Digit. Commun. Netw.(2022).


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20