
Zhirong Tang, Yue Jiang, Changwei Miao, Chengqiang Zhao. Three-Dimensional Point Cloud Registration Algorithm Based on Factor Analysis[J]. Laser & Optoelectronics Progress, 2019, 56(19): 191503
- Laser & Optoelectronics Progress
- Vol. 56, Issue 19, 191503 (2019)
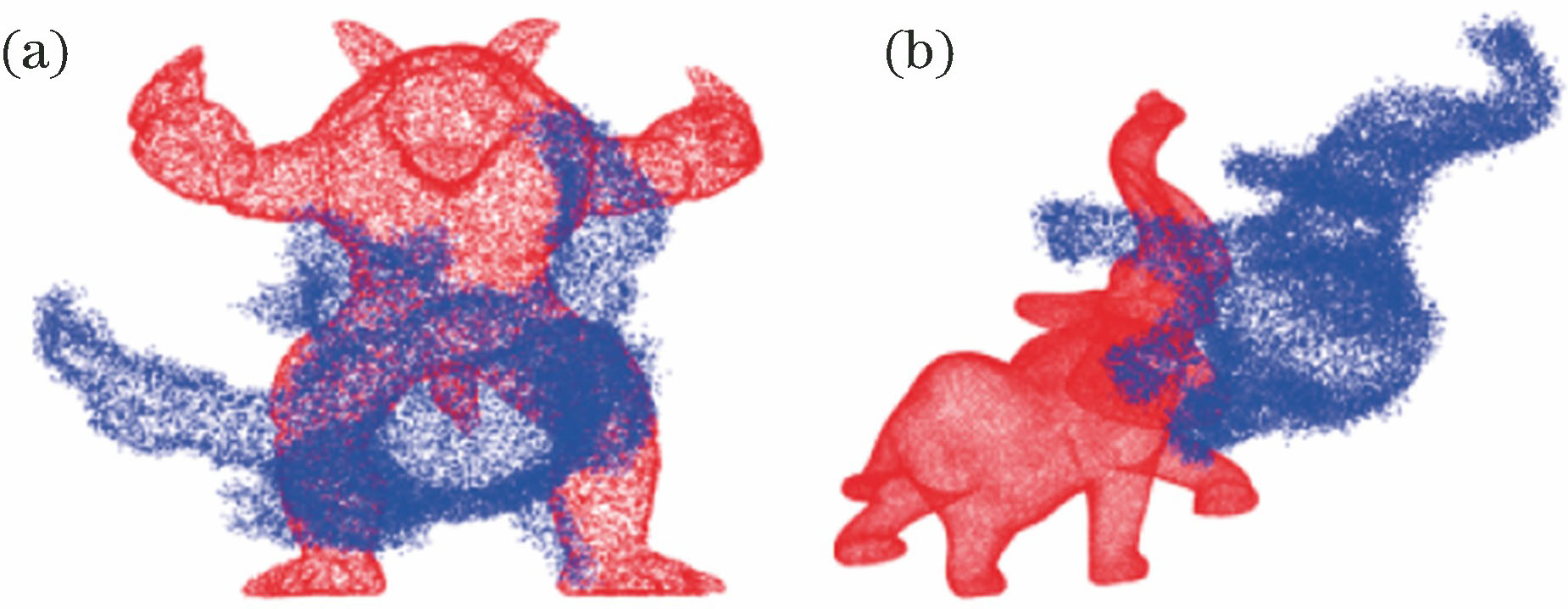
Fig. 1. Initial states of point clouds. (a) Armadillo; (b) Elephant
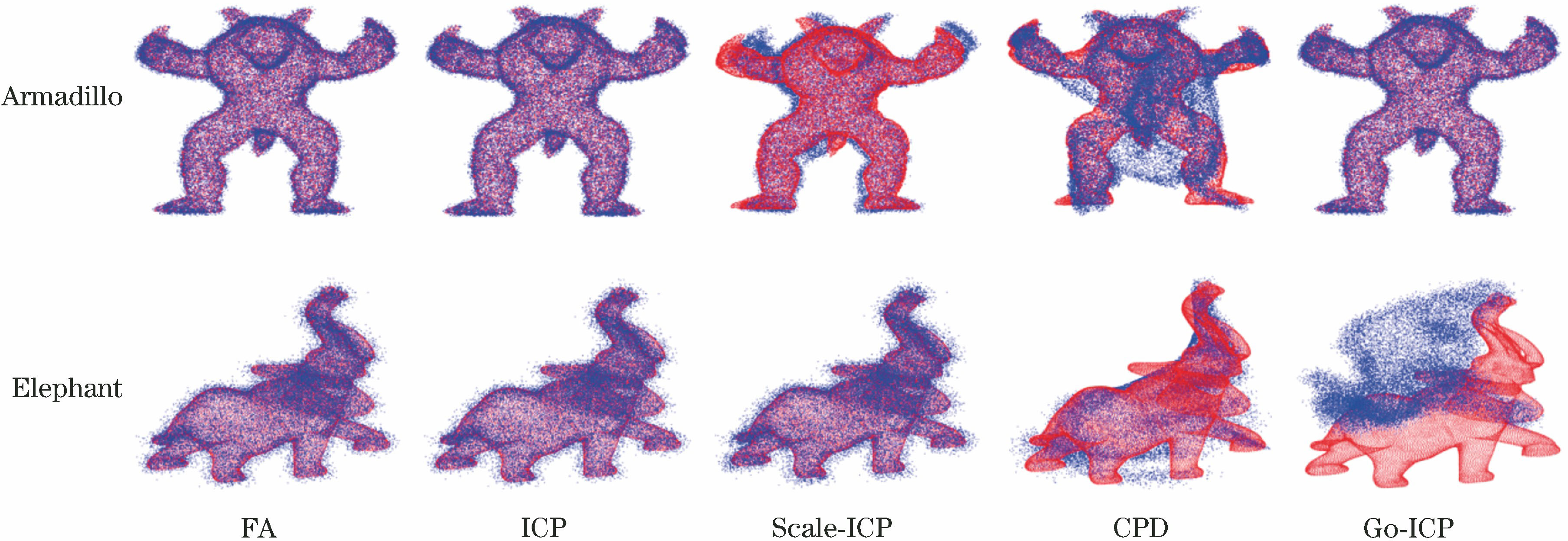
Fig. 2. Registration effects of Armadillo and Elephant point clouds by five algorithms
Fig. 3. Registration effect of Bunny point cloud in different white noise environments
Fig. 4. Registration error and registration time of Bunny point cloud in different white noise environments. (a) Registration time; (b) registration error
Fig. 5. Registration effect of Dragon point cloud in different data missing environments
Fig. 6. Registration error and registration time of Dragon point cloud in different data missing environments. (a) Registration time; (b) registration error
Fig. 7. Pictures of actual object. (a) Bottle; (b) Box
Fig. 8. Initial states of point clouds. (a) Bottle; (b) Box
Fig. 9. Registration effects of five algorithms
| ||||||||||||||||||||||||||||||||||
Table 1. Registration time and registration error of five algorithms
| ||||||||||||||||||||||||||||||||||
Table 2. Registration error and registration time of five algorithms for Bottle and Box point clouds

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20