
Lei Qu, Kangru Wang, Lili Chen, Jiamao Li, Xiaolin Zhang. Fast Road Detection Based on RGBD Images and Convolutional Neural Network[J]. Acta Optica Sinica, 2017, 37(10): 1010003
- Acta Optica Sinica
- Vol. 37, Issue 10, 1010003 (2017)
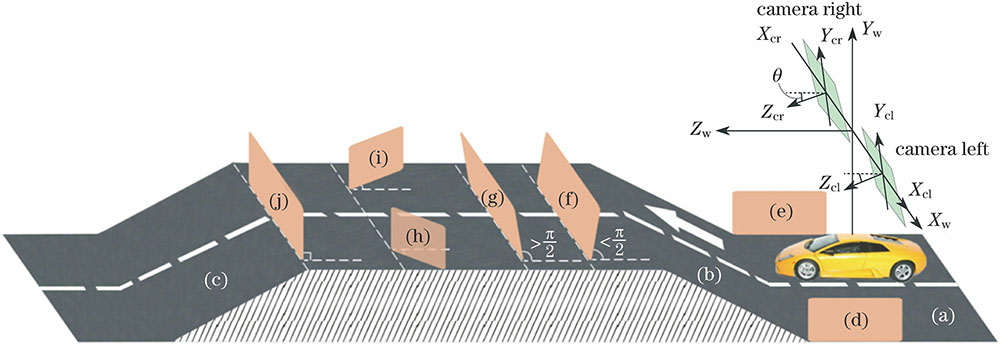
Fig. 1. Simulation of typical road scenes. (a)-(c) Road surfaces with different longitudinal slopes; (d)-(j) object surfaces with different orientations
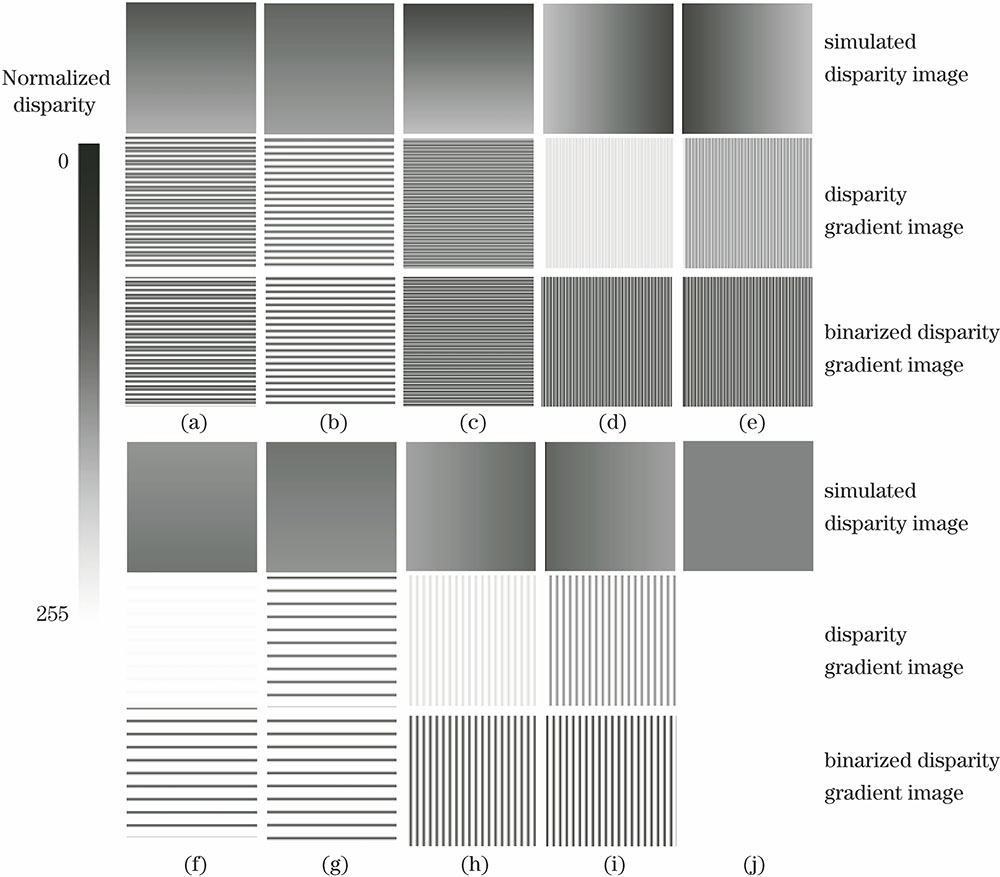
Fig. 2. Simulated disparity images, disparity gradient images and binarized disparity gradient images. (a) Level road; (b) uphill road; (c) downhill road; (d) left-side plane of the vehicle; (e) right-side plane of the vehicle; (f) forward plane of the vehicle; (g) backward plane of the vehicle; (h) left oblique plane of the vehicle; (i) right oblique plane of the vehicle; (j) vertical plane
Fig. 3. Flowchart of double-path convolutional neural network with late fusion
Fig. 4. Experimental results of KITTI road detection testing dataset. (a)(c) Method of Ref. [4]; (b)(d) proposed RGB-DT-IN algorithm
Fig. 5. Convolutional output visualization of road images. (a) Color and gradient maps of input four channel; (b) output results of convergence layer
Fig. 6. Convolutional output visualization of non-road images. (a) Color and gradient maps of input four channel; (b) output results of convergence layer
|
Table 1. Evaluation results of different methods on the common dataset%
|
Table 2. Evaluation results of different methods on the difficult dataset%
|
Table 3. Processing time of methodss

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20