
Zhenzhen Huang, Xiaomei Huang, Lianyu Zheng, Kejian Liu, Tao Peng, Zhijiang Zhang. Camera Calibration Method for Concentric Circle Eccentricity Error Compensation Iteration[J]. Acta Optica Sinica, 2022, 42(19): 1912003
- Acta Optica Sinica
- Vol. 42, Issue 19, 1912003 (2022)
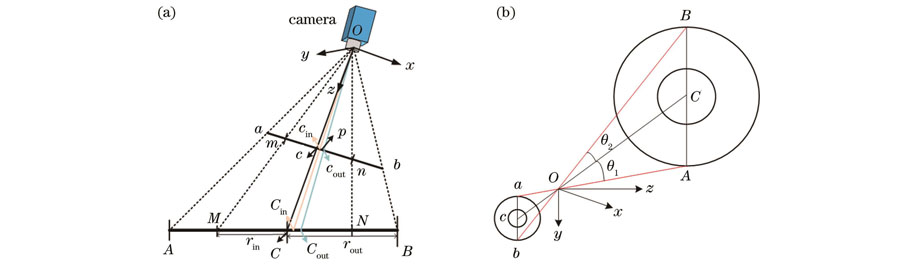
Fig. 1. Concentric circle eccentricity error model and geometric constraint model diagram. (a) Mathematical model of concentric circle eccentricity error; (b) geometric constraint mathematical model
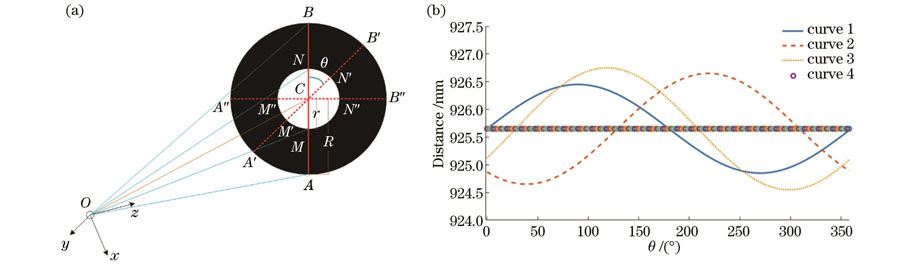
Fig. 2. Geometric constraint models of distance
Fig. 3. Pseudo-code of camera iterative calibration algorithm based on concentric circle center eccentricity error
Fig. 4. Comparison of concentric circle eccentricity error compensation
Fig. 5. Compensation results of eccentricity error for boundary points after adding noise
Fig. 6. Concentric circle calibration plate pattern
Fig. 7. Camera calibration of concentric planar target. (a)-(d) Concentric circle target patterns collected; (e) sub-pixel detection effect of concentric circle edge; (f) ordering of concentric circle feature points
Fig. 8. Camera calibration of concentric planar target
Fig. 9. Accuracy verification experiment of binocular system. (a) Binocular experimental measurement system; (b) benchmark ruler measurement; (c) binocular system calibration image
Fig. 10. Error between measured data and standard data of ruler length
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Camera inner parameters, reprojection error, and uncertainty obtained by two methods
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Correction results of binocular camera calibration parameters
|
Table 3. Statistical results of error between measurement data and standard length of base ruler

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20