
Min Zhao, Qin Shu, Wei Chen, Yunxiu Yang. Three-Dimensional Point Cloud Registration Algorithm Based on l
p Spatial Mechanics Model
[J]. Acta Optica Sinica, 2018, 38(10): 1010005
- Acta Optica Sinica
- Vol. 38, Issue 10, 1010005 (2018)
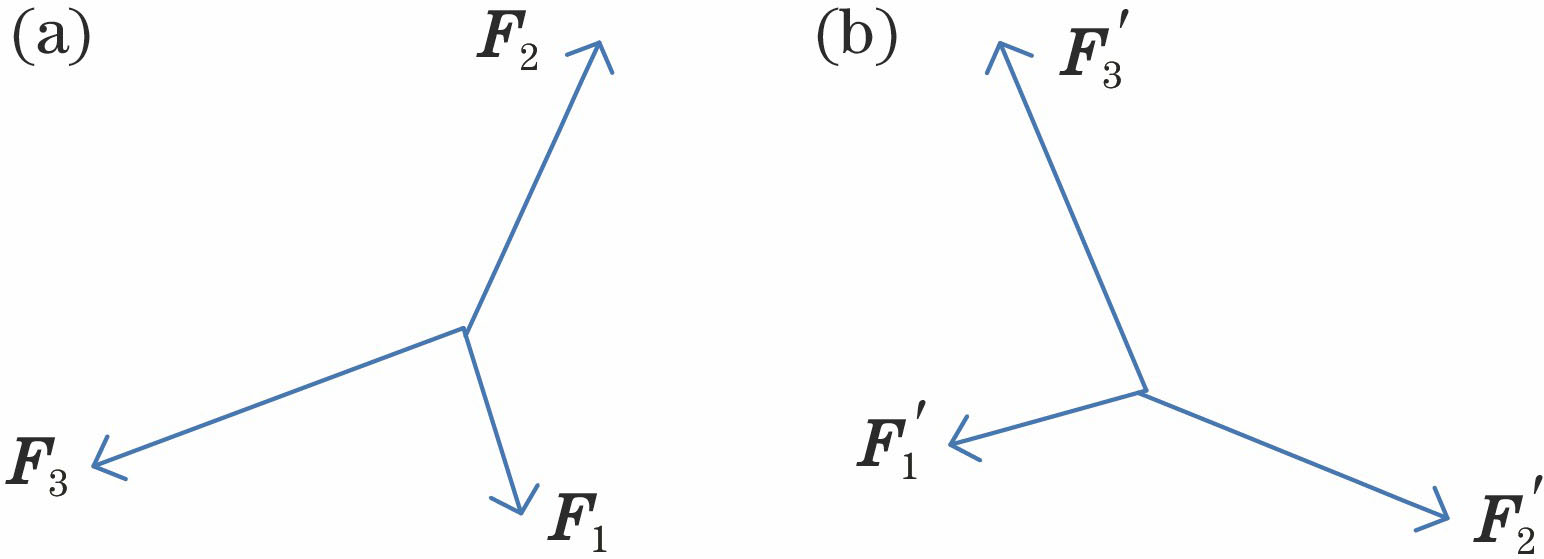
Fig. 1. (a) Eigenvector set FP of target point cloud P'; (b) eigenvector set FQ of source point cloud Q'
![Registration results of Bunny. (a) Original point cloud; (b) initial registration by algorithm in Ref. [26]; (c) precise registration by algorithm in Ref. [26]; (d) initial registration by proposed algorithm; (e) precise registration by proposed algorithm; (f) registration by classic ICP algorithm](/richHtml/gxxb/2018/38/10/1010005/img_2.jpg)
Fig. 2. Registration results of Bunny. (a) Original point cloud; (b) initial registration by algorithm in Ref. [26]; (c) precise registration by algorithm in Ref. [26]; (d) initial registration by proposed algorithm; (e) precise registration by proposed algorithm; (f) registration by classic ICP algorithm
Fig. 3. Registration results of Dragon. (a) Original point cloud; (b) initial registration by algorithm in Ref. [26]; (c) precise registration by algorithm in Ref. [26]; (d) initial registration by the proposed algorithm; (e) precise registration by proposed algorithm; (f) registration by classic ICP algorithm
Fig. 4. Multi-view 3D point cloud data of part model
Fig. 5. Registration results of part. (a) Original point cloud; (b) initial registration by algorithm in Ref. [26]; (c) precise registration by algorithm in Ref. [26]; (d) initial registration by proposed algorithm; (e) precise registration by proposed algorithm; (f) registration by classic ICP algorithm
Fig. 6. Registration result of milk & cleanser. (a) Original point cloud; (b) initial registration by proposed algorithm; (c) precise registration by proposed algorithm
| |||||||||||||||||||||||||||||
Table 1. Point cloud registration data comparison
|
Table 2. Point cloud registration data comparison

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20