
Jiameng Feng, Dong Pei, Yong Zou, Bowen Zhang, Peng Ding. An Improved AMCL Algorithm Based on Robot Laser Localization[J]. Laser & Optoelectronics Progress, 2021, 58(20): 2028003
- Laser & Optoelectronics Progress
- Vol. 58, Issue 20, 2028003 (2021)

Fig. 1. Basic steps of the AMCL algorithm
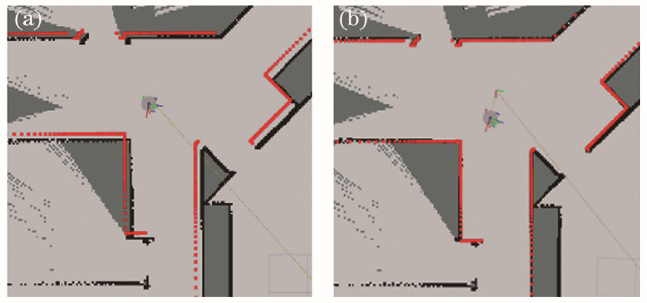
Fig. 2. Laser point cloud alignment results. (a) Before optimization; (b) after optimization
Fig. 3. Improved localization algorithm
Fig. 4. Algorithm data view
Fig. 5. Bicubic interpolation
Fig. 6. DFT improvement example. (a) Real scan of a robot placed in the center of a circular room; (b) virtual estimation measurement assuming robot displacement in the center
Fig. 7. Robot physical model
Fig. 8. Mobile robot locolization process
Fig. 9. Comparison of absolute localization experiments in sports. (a) Position trajectory; (b) orientation
Fig. 10. Pose comparison in the X-axis direction. (a) Trajectory; (b) error
Fig. 11. Pose comparison in the Y-axis direction. (a) Trajectory; (b) error
|
Table 1. Average error of absolute localization accuracy
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Repeat localization accuracy test results

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20