
Duo Zhou, Peng Wang, Changku Sun, Meihan Dong, Luhua Fu. Calibration Method for Trinocular Stereovision System Comprising Projector and Dual Cameras[J]. Acta Optica Sinica, 2021, 41(11): 1115001
- Acta Optica Sinica
- Vol. 41, Issue 11, 1115001 (2021)
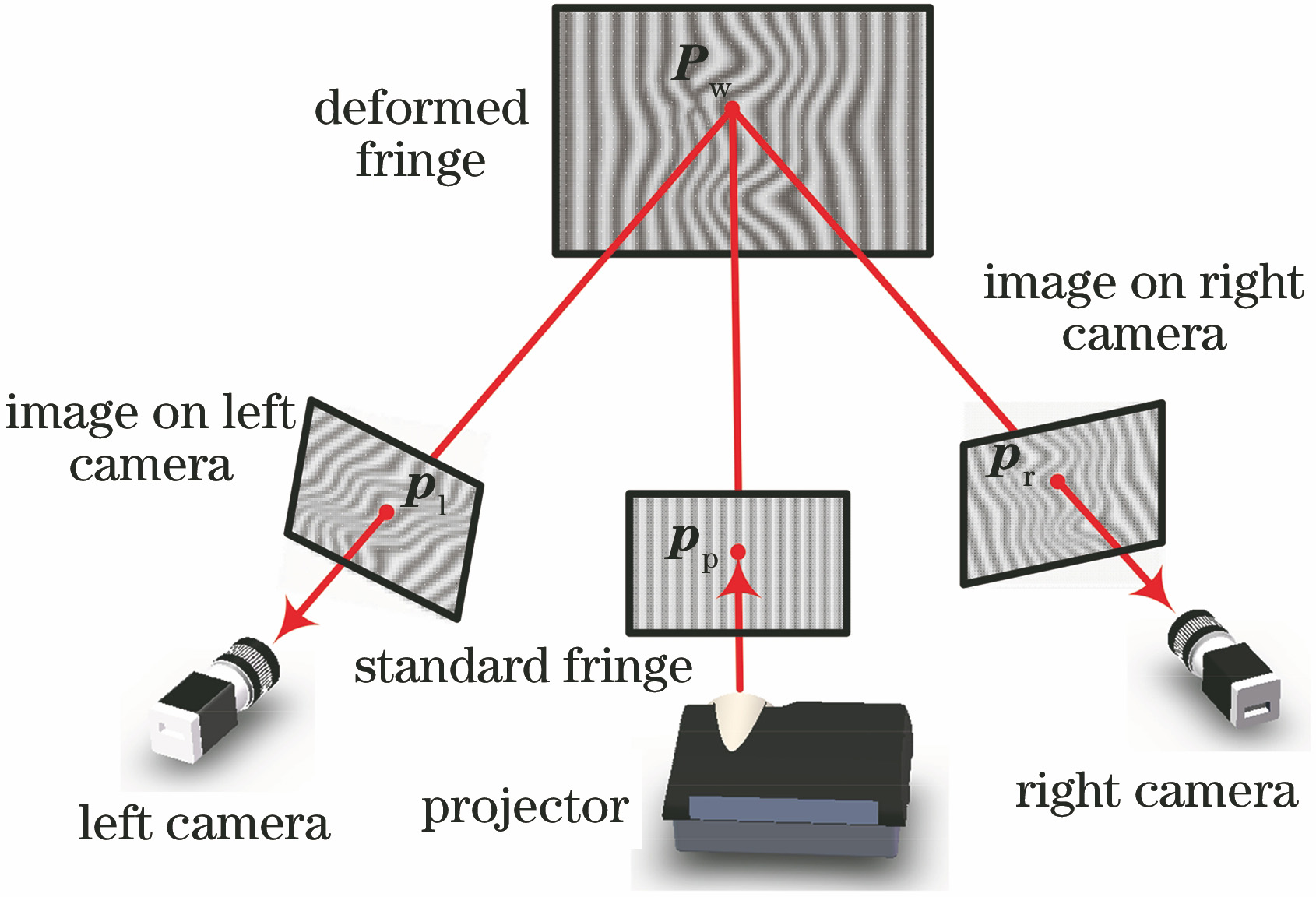
Fig. 1. Model of 1P2C vision measurement system
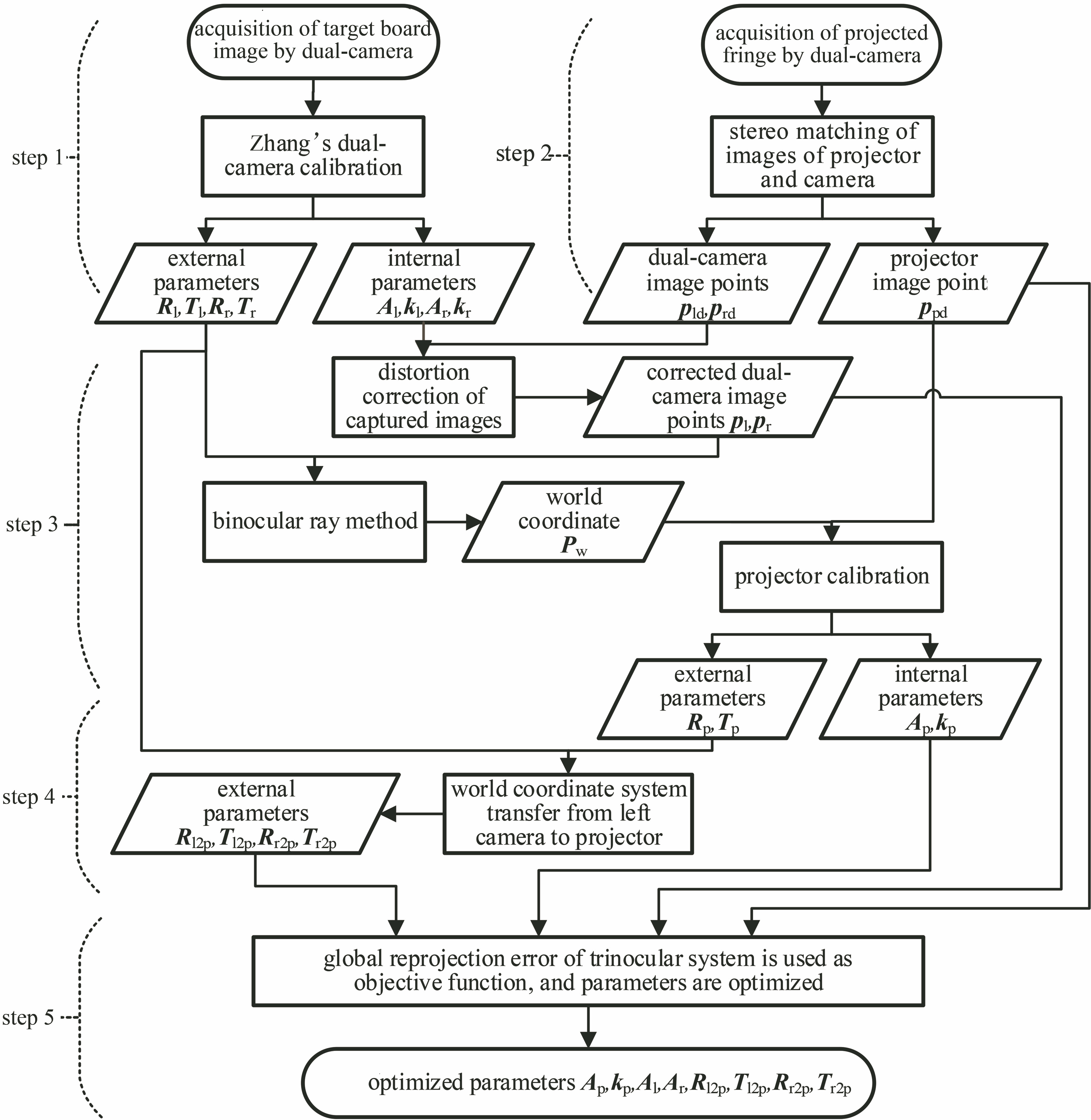
Fig. 2. Parameter calibration and optimization process of 1P2C vision system
Fig. 3. Experimental equipment of 1P2C system
Fig. 4. 1P2C system calibration image target. (a) Plane target with identification; (b) paper target
Fig. 5. Fringe images collected at target location. (a) Longitudinal fringe pattern of left camera; (b) lateral fringe pattern of left camera; (c) longitudinal fringe image of right camera; (d) lateral fringe image of right camera
Fig. 6. Image coordinates of homonymic point of projector and left and right cameras
Fig. 7. Statistical results of deviation distance between coordinate of characteristic point and corresponding polar line. (a) Unoptimized new projector model; (b) globally optimized traditional projector model; (c) globally optimized new projector model
Fig. 8. Standard gauges used in verification experiments
Fig. 9. Comparison of fitting plane errors of different stereo vision measurement schemes. (a) Traditional binocular vision; (b) new projector models; (c) optimized conventional projector models; (d) new optimized projector model
| ||||||||||||||||||||||||||||||||||||||||||||
Table 1. Comparison of system parameters before and after optimization

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20