
Cen Hua, Xiao Fu, Fajie Duan, Cong Zhang, Ming Yan, Rui Du. Coordinate Matching of Multiple Points Based on Constant Cross Ratio[J]. Laser & Optoelectronics Progress, 2022, 59(10): 1015001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 10, 1015001 (2022)
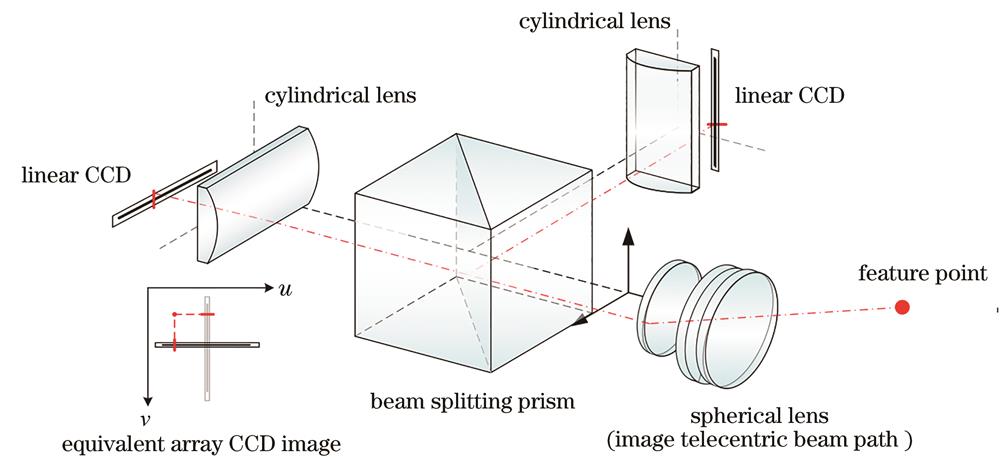
Fig. 1. Schematic of optical path imaging of the proposed system
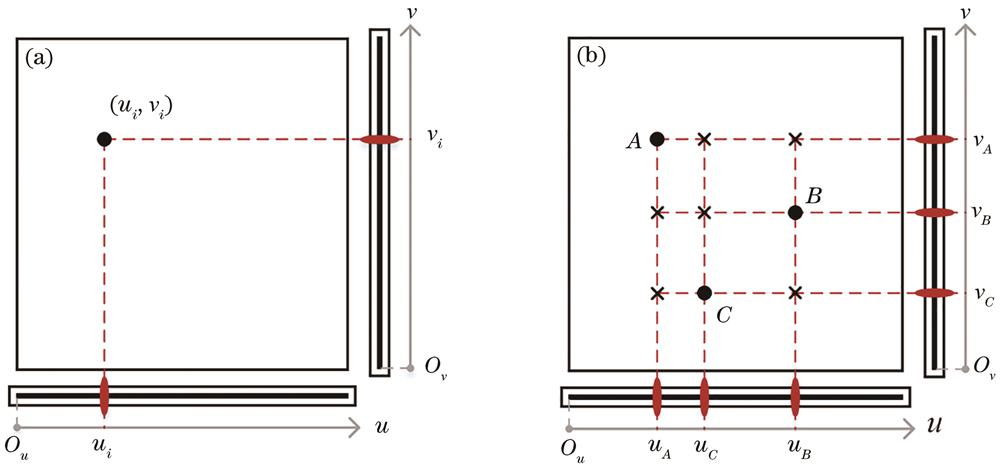
Fig. 2. Equivalent imaging diagrams. (a) Equivalent imaging diagram of single point; (b) equivalent imaging diagram of multiple points
Fig. 3. Principle of cross-ratio invariability.(a) Projective transformation among point range; (b) projective transformation among wiring harness
Fig. 4. Cooperative target design. (a) Coplanar five points; (b) coplanar multiple points
Fig. 5. Flowchart of coordinate matching algorithm based cross ratio invariability
Fig. 6. Overlapping of collinear points' coordinates
Fig. 7. n possible cases of coordinate overlapping
Fig. 8. Matching flow chart
Fig. 9. Overlap ratio along two directions. (a) u direction; (b) v direction
Fig. 10. Matching accuracy under overlap situation
Fig. 11. Pose esitmation error when motion speed changes. (a) Mean rotation error; (b) mean translation error
|
Table 1. Matching time comparison

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20