
Xiaodong Jiang, Jiyan Yu, Jiansen Huang, Likun Zhu. Observation System of Special Vehicle Based on Perspective Display[J]. Acta Optica Sinica, 2019, 39(2): 0215005
- Acta Optica Sinica
- Vol. 39, Issue 2, 0215005 (2019)
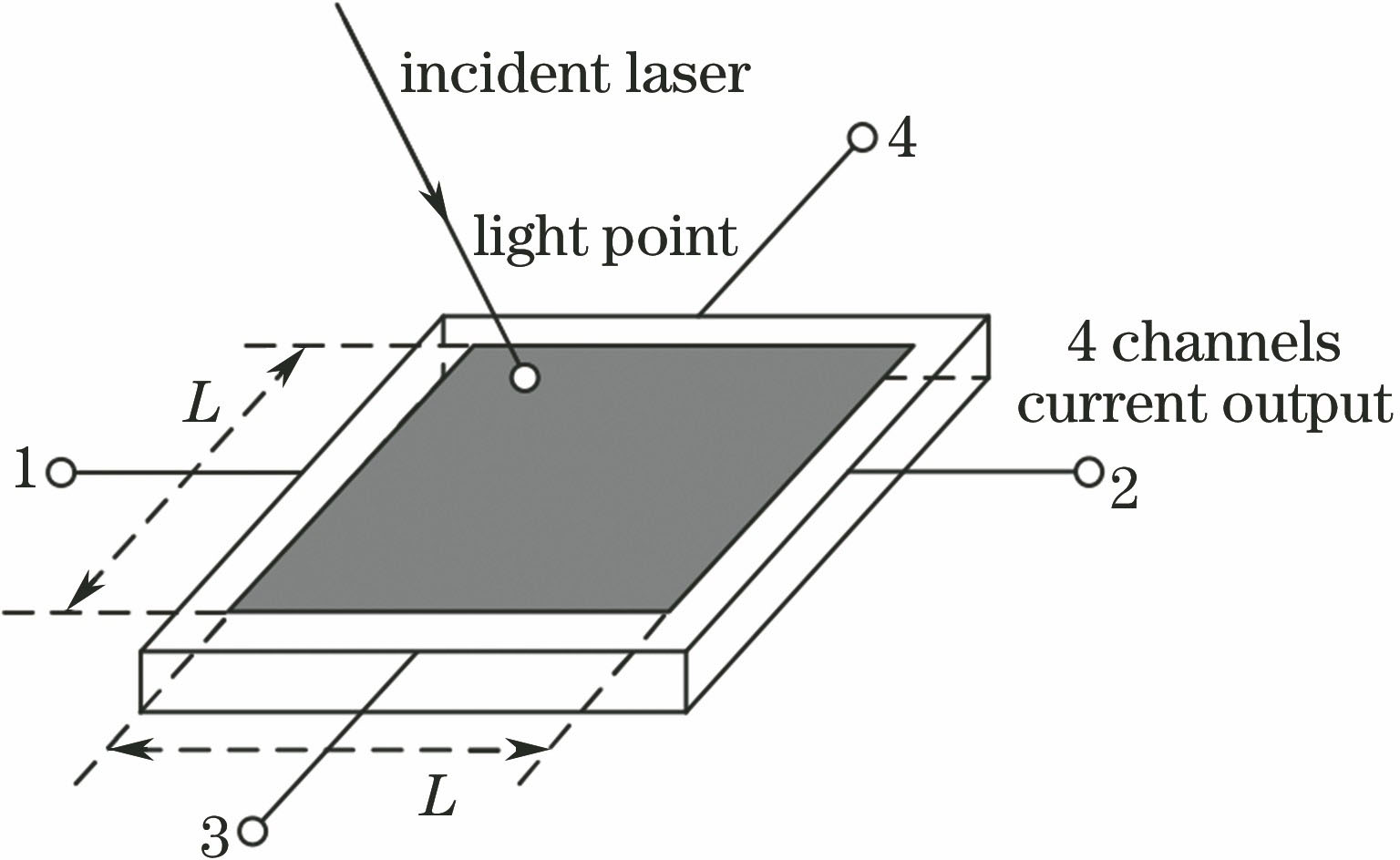
Fig. 1. Working principle of PSD sensor
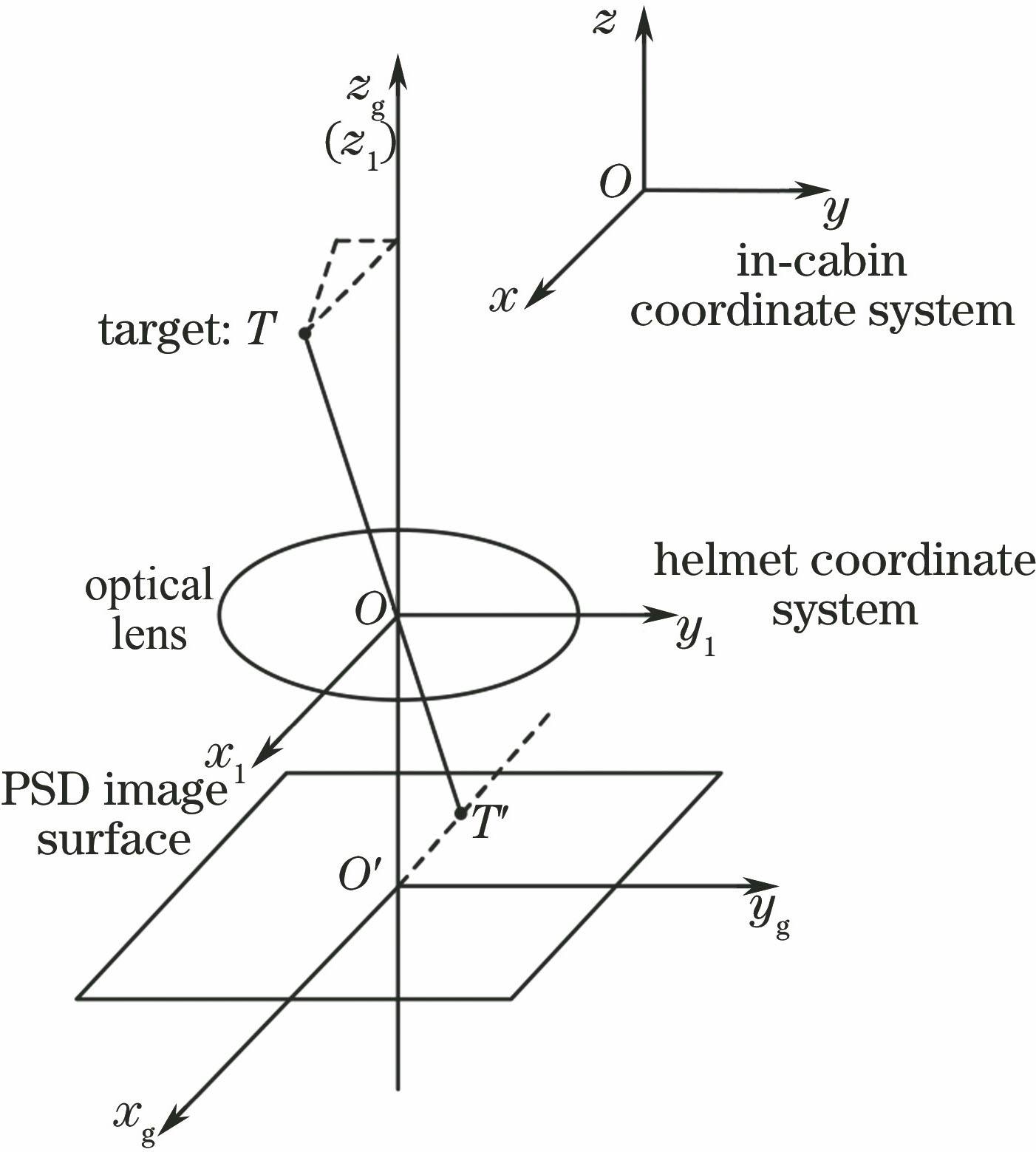
Fig. 2. Relations of transformation in coordinate system
Fig. 3. Relation of inertial attitude sensing axis
Fig. 4. Structure of outboard observation system based on visual display
Fig. 5. Design of PSD signal processing circuit
Fig. 6. Flow of complementary fusion filtering algorithm for helmet attitude angle
Fig. 7. Helmet perspective solution principle
Fig. 8. Design diagram of optical system for perspective display
Fig. 9. Schematic of ZEMAX's equivalent optical design
Fig. 10. Effect of distortion correction. (a) Image before distortion correction; (b) image after distortion correction
Fig. 11. Overall structure diagram of hardware acceleration process of image feature calculation and registration based on Zynq SoC processor
Fig. 12. Hardware circuit implementation of Gaussian filtering. (a) Hardware circuit structure; (b) window function of Gaussian filter
Fig. 13. Original image and effect of Gaussian filtering image. (a) Original image; (b) image filtered by Gaussian filter
Fig. 14. Schematic diagram of Gaussian scale pyramid and differential Gaussian pyramid
Fig. 15. Schematic of hardware circuit for parallel detection
Fig. 16. Effect of image feature points and direction determination. (a) Original image; (b) characteristic image
Fig. 17. Flow chart of hardware realization for electronic image stabilization based on image features
Fig. 18. Flow chart of hardware realization for image registration and fusion processing
Fig. 19. Experimental results of hardware realization for image feature matching and fusion. (a) Left image; (b) right image; (c) schematic diagram of image feature matching and fusion
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Experimental results of position detection, attitude sensing and perspective
| ||||||||||||||||||||||||||||||||
Table 2. Experiment results of image feature extraction and time-consuming comparison
|
Table 3. Experimental results of electronic image stabilization

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20