
Sen Lin, Ying Zhao. Review on Key Technologies of Target Exploration in Underwater Optical Images[J]. Laser & Optoelectronics Progress, 2020, 57(6): 060002
- Laser & Optoelectronics Progress
- Vol. 57, Issue 6, 060002 (2020)
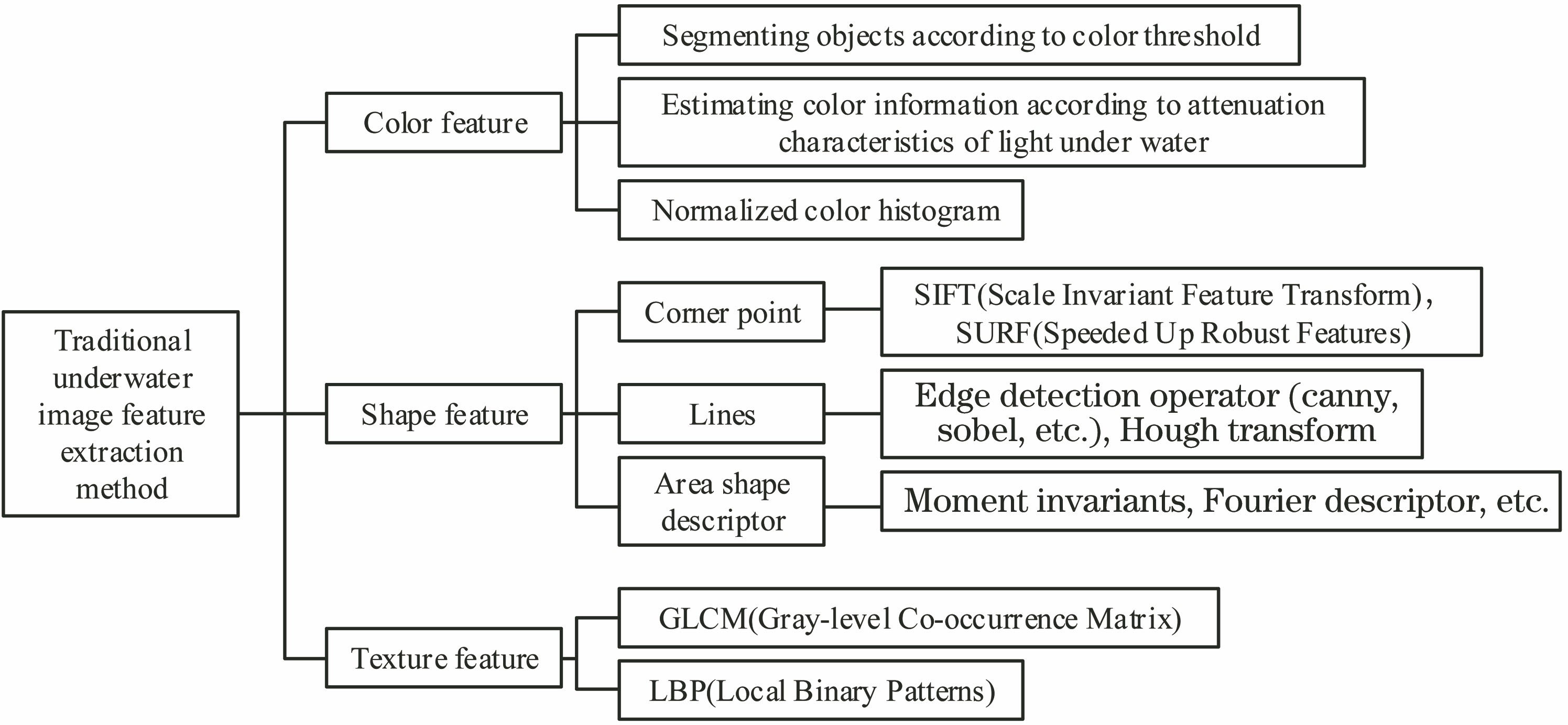
Fig. 1. Traditional methods of underwater image feature extraction
|
Table 1. Comparison of underwater image enhancement methods
|
Table 2. Comparison of underwater scene coefficient estimation methods
|
Table 3. Comparison of depth neural network for underwater target detection and recognition
|
Table 4. Comparison of underwater target tracking methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20