
Dongbin Han, Youchun Xu, Rendong Wang, Yao Qi, Hua Li. Calibration of Three-Dimensional Lidar Extrinsic Parameters Based on Multiple-Point Clouds Matching[J]. Laser & Optoelectronics Progress, 2018, 55(2): 022803
- Laser & Optoelectronics Progress
- Vol. 55, Issue 2, 022803 (2018)
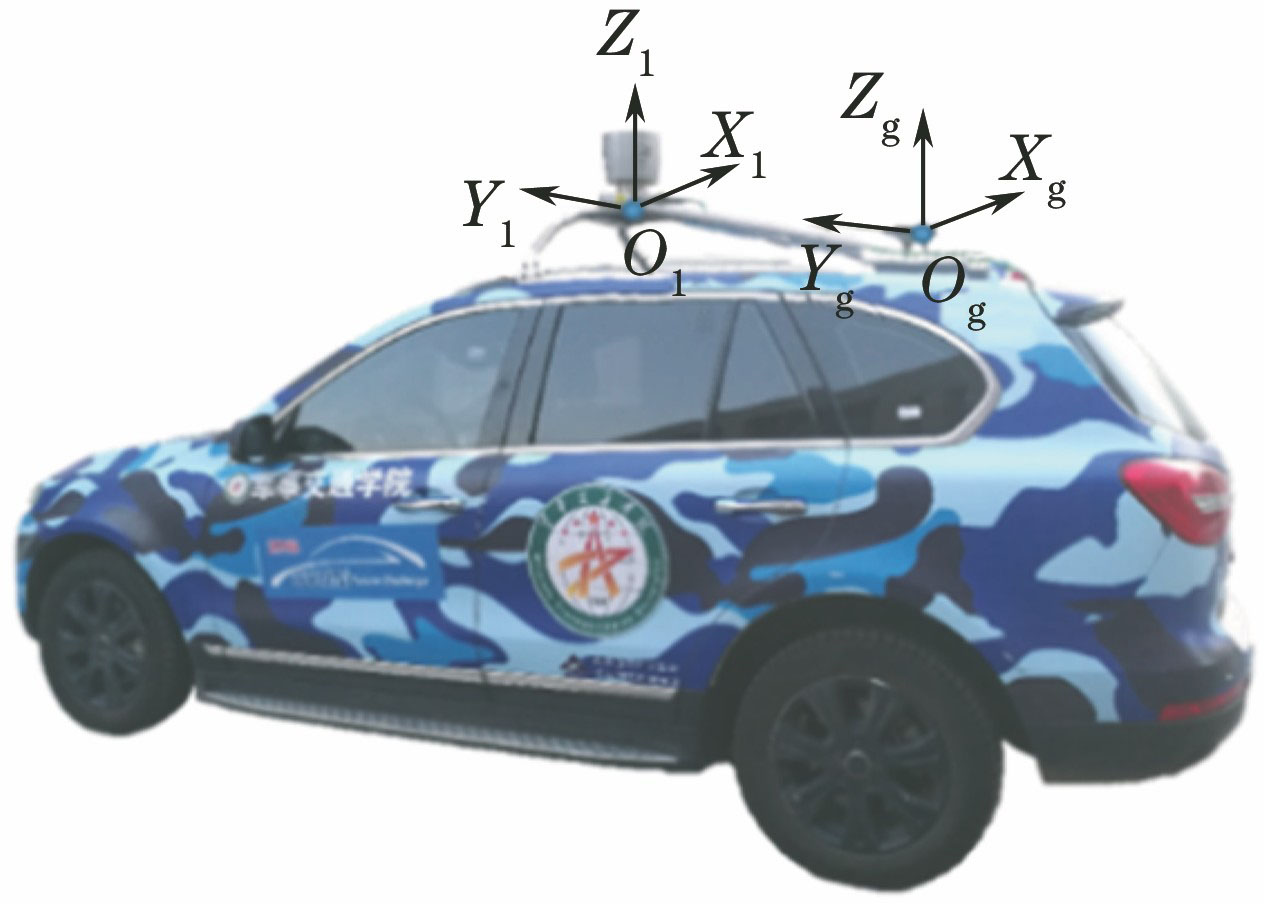
Fig. 1. Experimental platform
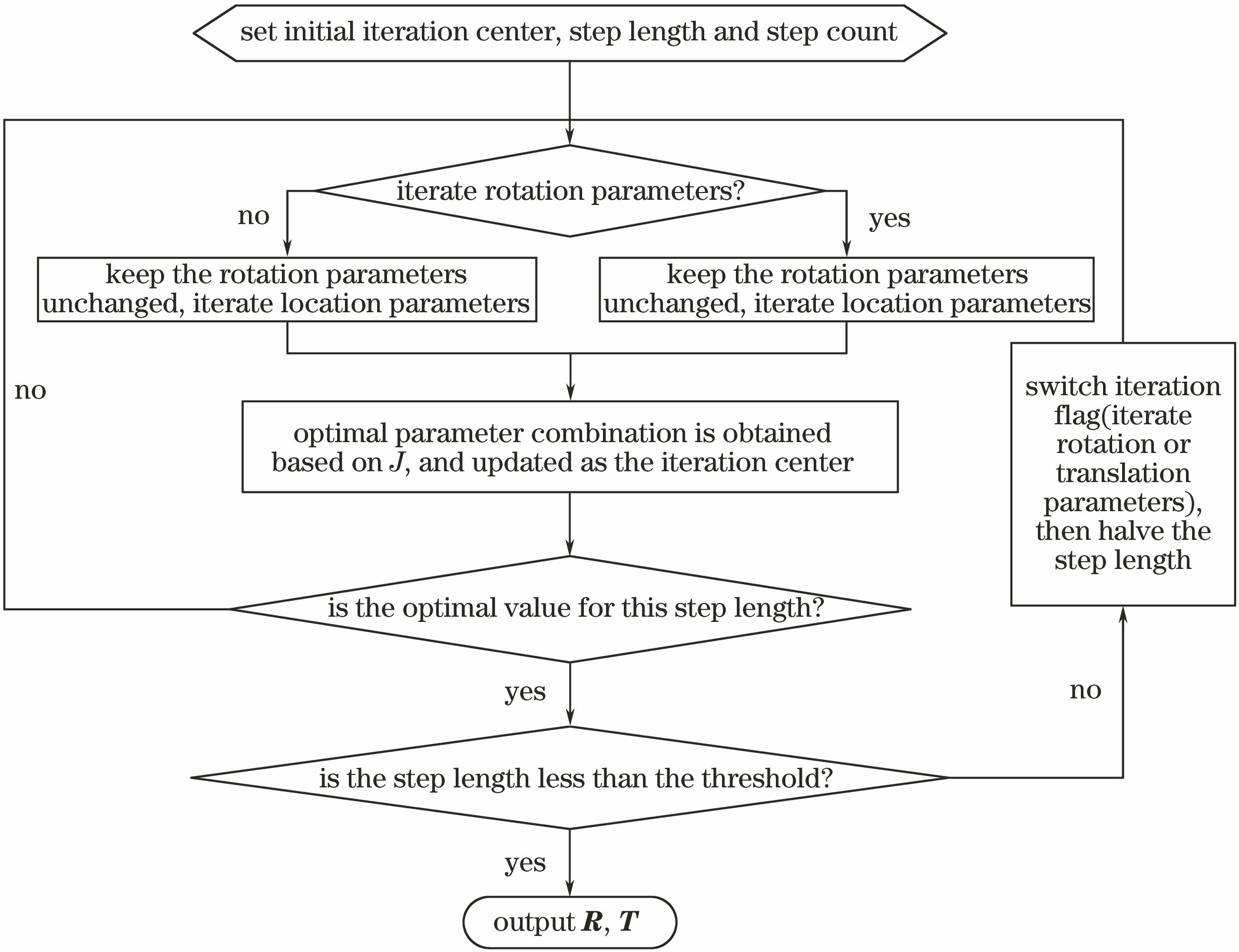
Fig. 2. Program flow diagram
Fig. 3. Vehicle trajectory diagram
Fig. 4. Two scene point cloud overlay maps before calibration. (a) Calibration scene 1; (b) calibration scene 2
Fig. 5. Variation of several main extrinsic parameters and objective function with the number of iterations in calibration scene 2. (a) x; (b) y; (c) θyaw; (d) J
Fig. 6. Iteration process diagrams in calibration scene 2. (a) Initial range; (b) points of the iteration process; (c) range after moving the iteration center
Fig. 7. Two scene point cloud overlay maps after calibration. (a) Calibration scene 1; (b) calibration scene 2
|
Table 1. Calibration results using different step lengths and different step counts in calibration scene 1
|
Table 2. Calibration results in calibration scene 2
|
Table 3. Mean value and standard deviation of calibration results for different initial iteration centers

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20