
Chenglei Fan, Binbin Luo, Decao Wu, Xue Zou, Hongcheng Rao, Fumin Zhou, Ling Huang, Shenghui Shi, Xinyu Hu. Flexible Bionic Microstructure Tactile Sensor Based on Micro-Nano Optical Fiber[J]. Acta Optica Sinica, 2023, 43(21): 2106004
- Acta Optica Sinica
- Vol. 43, Issue 21, 2106004 (2023)
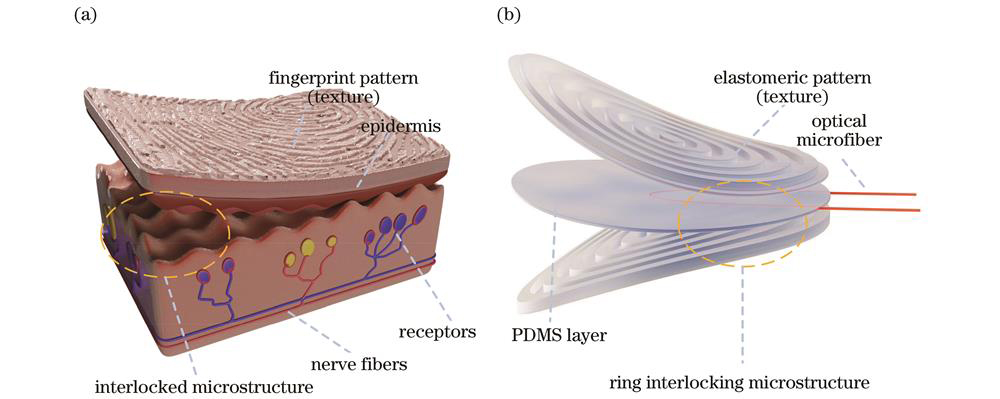
Fig. 1. Schematic diagram of a FIMF sensor simulating human finger skin. (a) Structure of fingertip skin; (b) structure of FIMF sensor

Fig. 2. Effect of sensor layer thickness on performance. (a) Effect of PDMS thickness on stress; (b) effect of annular ridge thickness on stress
Fig. 3. Sensor mechanical response. (a) Planar deformation distribution where the optical fiber is located; (b) stress distribution under different conditions; (c) sensor output response under finger press sliding
Fig. 4. Schematic diagram of the structure of dual-mode interference MNF
Fig. 5. Micro-nano fiber. (a) Change of effective refractive index and MNF diameter of HE11 and HE12 modes when the wavelength is 1550 nm; (b) MNF analog spectra with diameters of 10 μm, 5 μm, and 2.3 μm; (c) changes in FSR around 1550 nm for different diameters of MNF
Fig. 6. Physical diagram of the sensor. (a) Microscope diagram of MNF with a diameter of 5 μm; (b) physical drawing of FIMF;(c) transmission spectra before and after packaging
Fig. 7. Comparison and calibration of mechanical properties. (a) Diagram of the experimental system for mechanical property testing; (b) comparison of sensors with different structural packages; (c) FIMF pressure spectral response; (d) FIMF sensitivity; (e) repeatability; (f) response/recovery time
Fig. 8. Mechanical property tests. (a) Response curve for incremental pressure; (b) repeatability testing; (c) sensor response of different frequencies at 1 N pressure; (d) different pressure sensors response at 0.5 Hz
Fig. 9. Hardness perception. (a) Diagram of the experimental system; (b) relationship between the change in the transmission strength and hardness of the three cycles ; (c) relationship between the change in strength and the change in hardness of a single cycle; (d) relationship between hardness and transmission strength of 30 cycles; (e) FIMF integration into the manipulator; (f) waveforms of intensity changes when gripping different objects using a robotic hand integrated with FIMF
Fig. 10. Texture perception. (a) Schematic diagram of the experimental system; (b) test objects with a spacing of 4 mm; (c) response waveform of the contact scan; (d) response waveforms scanned at different pressures; (e) response waveform at 50 mm/s and 100 mm/s scanning speed
Fig. 11. Different scanning speeds. (a) Response waveform; (b) spectrograms of FFT transforms; (c) time-frequency diagram of FFT transform
Fig. 12. Test objects with different textures. (a) Physical drawings of test objects with texture spacing of 1 mm and 0.5 mm; (b) response waveform; (c) time-frequency diagram of FFT transform
|
Table 1. Performance comparison with other micro-nano fiber tactile pressure sensors

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20