
Dejiang Chen, Wenjun Yu, Yongbin Gao. Lidar 3D Target Detection Based on Improved PointPillars[J]. Laser & Optoelectronics Progress, 2023, 60(10): 1028012
- Laser & Optoelectronics Progress
- Vol. 60, Issue 10, 1028012 (2023)
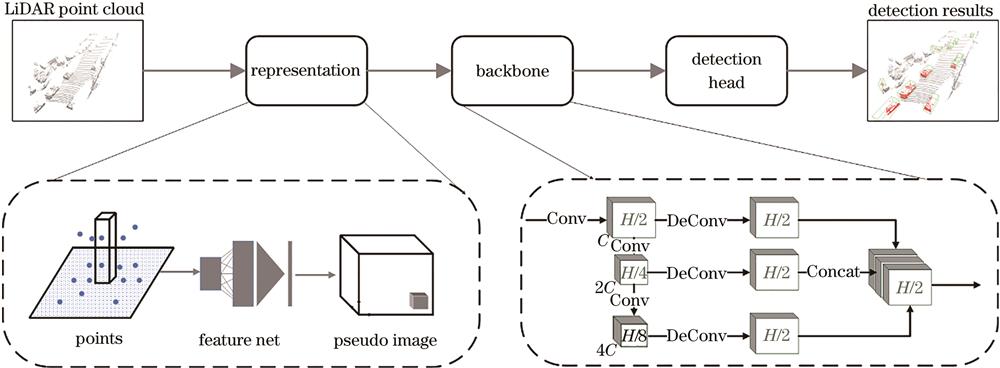
Fig. 1. Flow chart of PointPillars algorithm

Fig. 2. Visual effect of original PointPillars detection
Fig. 3. Improved feature sampling module
Fig. 4. Lidar point cloud removal of ground parts
Fig. 5. Point cloud data enhancement. (a) Raw point cloud; (b) mirrored point cloud; (c) tilted point cloud; (d) zoomed point cloud
Fig. 6. Comparison of experimental results for hyperparameter selection
Fig. 7. Comparison of detection accuracy before and after algorithm improvement
Fig. 8. Comparison of detection effects before and after algorithm improvement
|
Table 1. Hyperparameter configuration of Swin-T module
|
Table 2. Comparison of accuracy rates of different Swin-T hyperparameter configurations
|
Table 3. Comparison of test results
|
Table 4. Comparison of GPU memory usage and running speed before and after algorithm improvement

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20