
Wenqi Wang, Zongchun Li, Yongjian Fu, Hua He, Feng Xiong. Multi-Factor Segmentation of Point Cloud Based on Improved Multi-Rule Region Growing[J]. Acta Optica Sinica, 2021, 41(5): 0528001
- Acta Optica Sinica
- Vol. 41, Issue 5, 0528001 (2021)
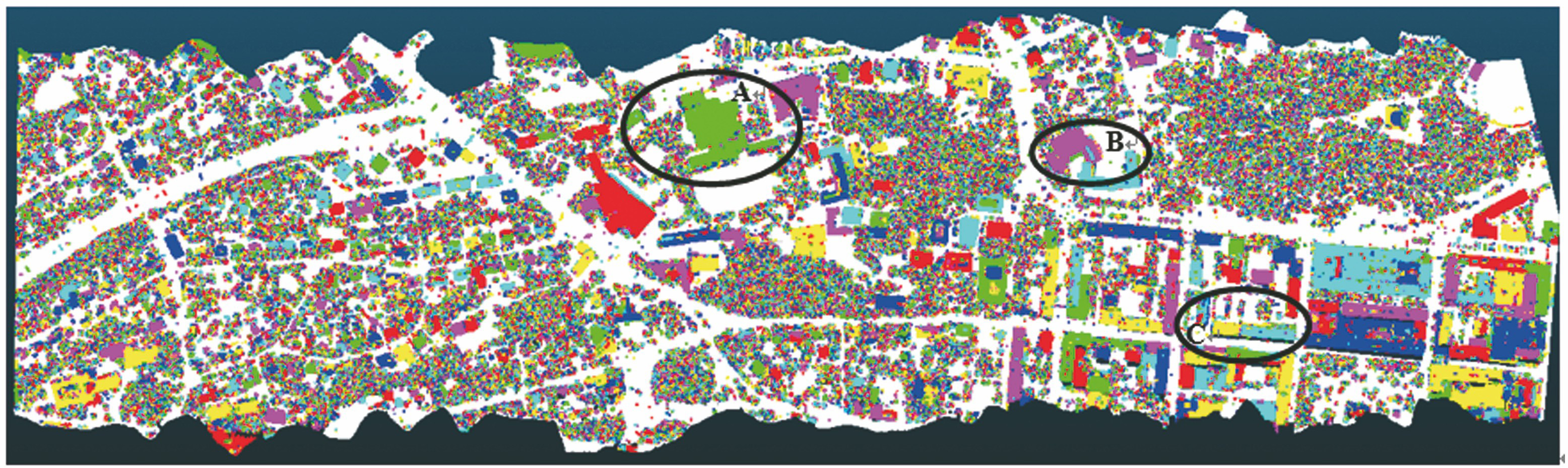
Fig. 1. An example of point cloud multi-factor segmentation based on traditional RG algorithm

Fig. 2. An example of point cloud multi-factor segmentation based on MRG algorithm
Fig. 3. An example of normal vector. (a) Point cloud; (b) normal vector of point cloud
Fig. 4. An example of linear and planar point set segmentation. (a) Linear point set; (b) planar point set
Fig. 5. Schematic diagram of threshold vt setting
Fig. 6. An example of volume change based on correct merging (ΔV=2.13). (a) Unmerged segments; (b) convex hulls of unmerged segments; (c) merged segment; (d) convex hull of merged segments
Fig. 7. An example of volume change based on incorrect merging (ΔV=17214.04). (a) Unmerged segments; (b) convex hulls of unmerged segments; (c) merged segment; (d) convex hull of merged segments
Fig. 8. Pseudo-code of merge strategy
Fig. 9. Point cloud data set. (a) Airborne point cloud (scene I); (b) terrestrial point cloud (scene II); (c) vehicle-borne point cloud (scene III)
Fig. 10. Reference data of each scene. (a) Scene I; (b) scene II; (c) scene III
Fig. 11. Segmentation results of planar point set in Scene II and Scene III (Nt=15°). (a) MRG in Scene II; (b) IMRG in Scene II; (c) MRG in Scene III; (d) IMRG in Scene III
Fig. 12. Incorrect segmentation. (a) RG+mean shift; (b) CSF+DBSCAN; (c) GMIC
|
Table 1. 1 Segmentation results of ground in Scene I
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Segmentation evaluation of building plane in each scene
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. 0 F1 score of segmentation in Scene III
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Segmentation evaluation of ground in each scene
|
Table 3. Merge threshold parameters
| |||||||||||||||||||||||||||||||||||
Table 4. Merge results in Scene I
| ||||||||||||||||||||||||||||||||||||||||||
Table 5. Merge results in Scene II
| ||||||||||||||||||||||||||||||||||||||||||
Table 6. Merge results in Scene III
| ||||||||||||||||||||||||
Table 7. Parameters for Method 4
| ||||||||||||||||||||||||||||
Table 8. F1 score of segmentation in Scene I
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 9. F1 score of segmentation in Scene II

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20