
Qi Qian, Tingming Bai, Yunfeng Bi, Chengyu Qiao, Zhiyu Xiang. Monocular Simultaneous Localization and Mapping Initialization Method Based on Point and Line Features[J]. Acta Optica Sinica, 2021, 41(12): 1215002
- Acta Optica Sinica
- Vol. 41, Issue 12, 1215002 (2021)
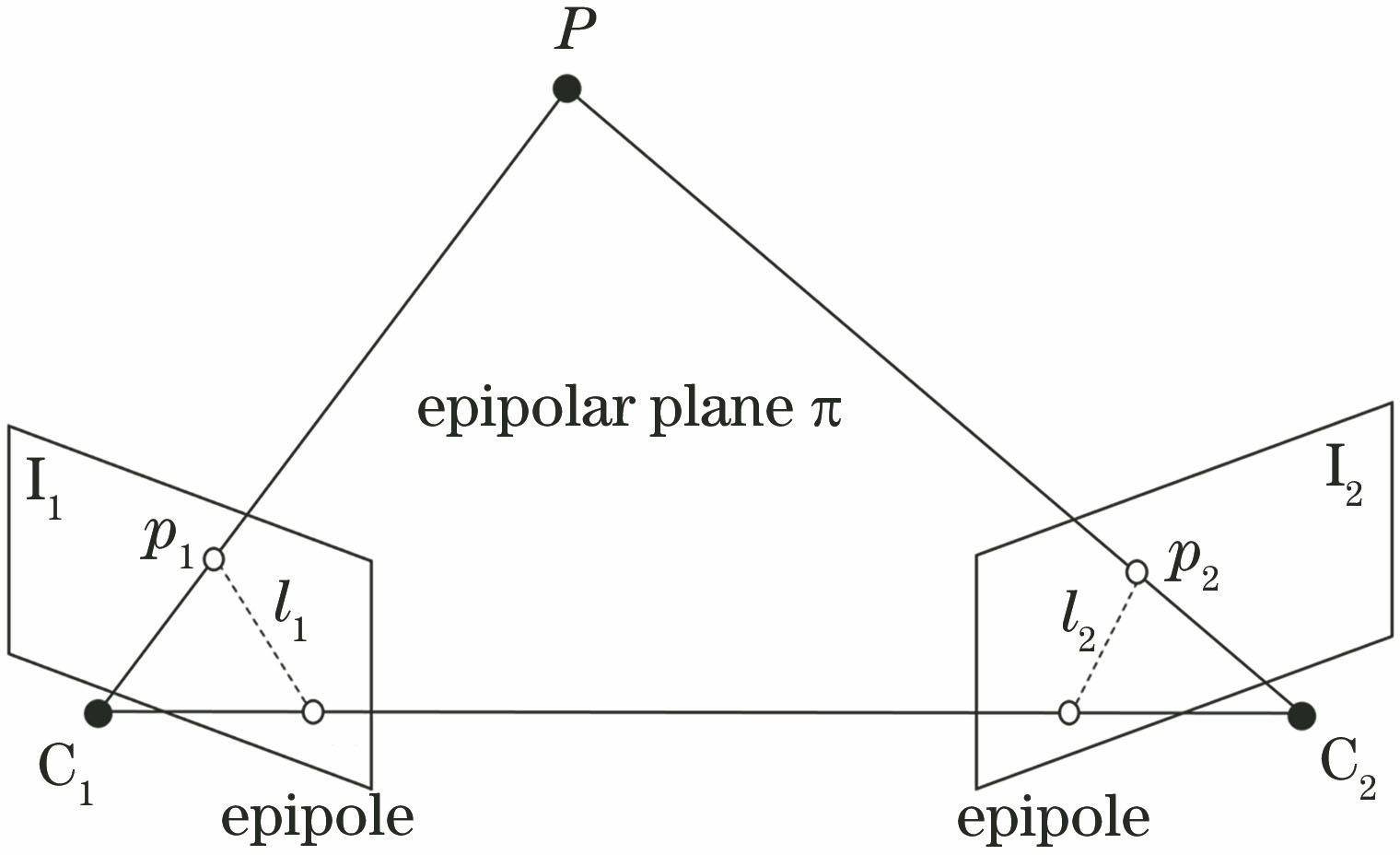
Fig. 1. Epipolar geometry of a point
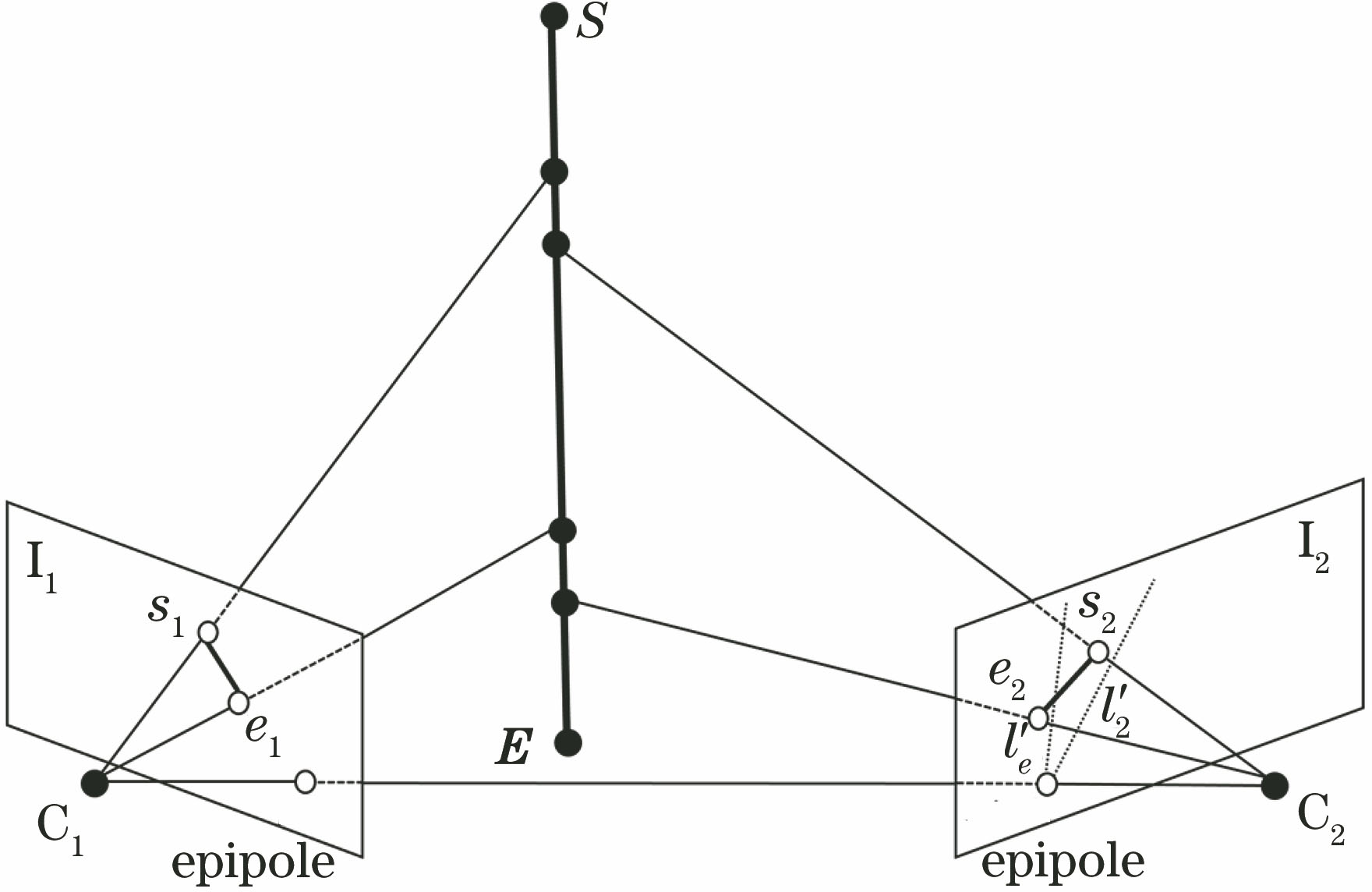
Fig. 2. Epipolar geometry of a line segment
Fig. 3. Overlap length of the matched line segment feature
Fig. 4. Four cases of overlapping line segments
Fig. 5. Common view relationship of keyframe, map points and lines
Fig. 6. Schematic diagram of the reprojection error. (a) Point feature; (b) line feature
Fig. 7. Initialization results of two methods on the TUM dataset. (a) Our method; (b) traditional method
Fig. 8. Variation curve of ATE of the system with N
Fig. 9. Trajectories of the two methods on the cafe2 sequence. (a) Our method; (b) traditional method
Fig. 10. Initialization results of the two methods on the corridor1-1 sequence. (a) Our method; (b) traditional method
|
Table 1. Positioning of the system before and after line feature optimizationunit: cm
|
Table 2. ATE of different algorithms on TUM-RGBD sequencesunit: cm
|
Table 3. ATE of different methods on the TUM dataset unit: cm
|
Table 4. [in Chinese]

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20