
Qiannan Jia, Wei Lyu, Wei Yan, Weiwei Tang, Jinsheng Lu, Min Qiu, "Optical manipulation: from fluid to solid domains," Photon. Insights 2, R05 (2023)
- Photonics Insights
- Vol. 2, Issue 2, R05 (2023)
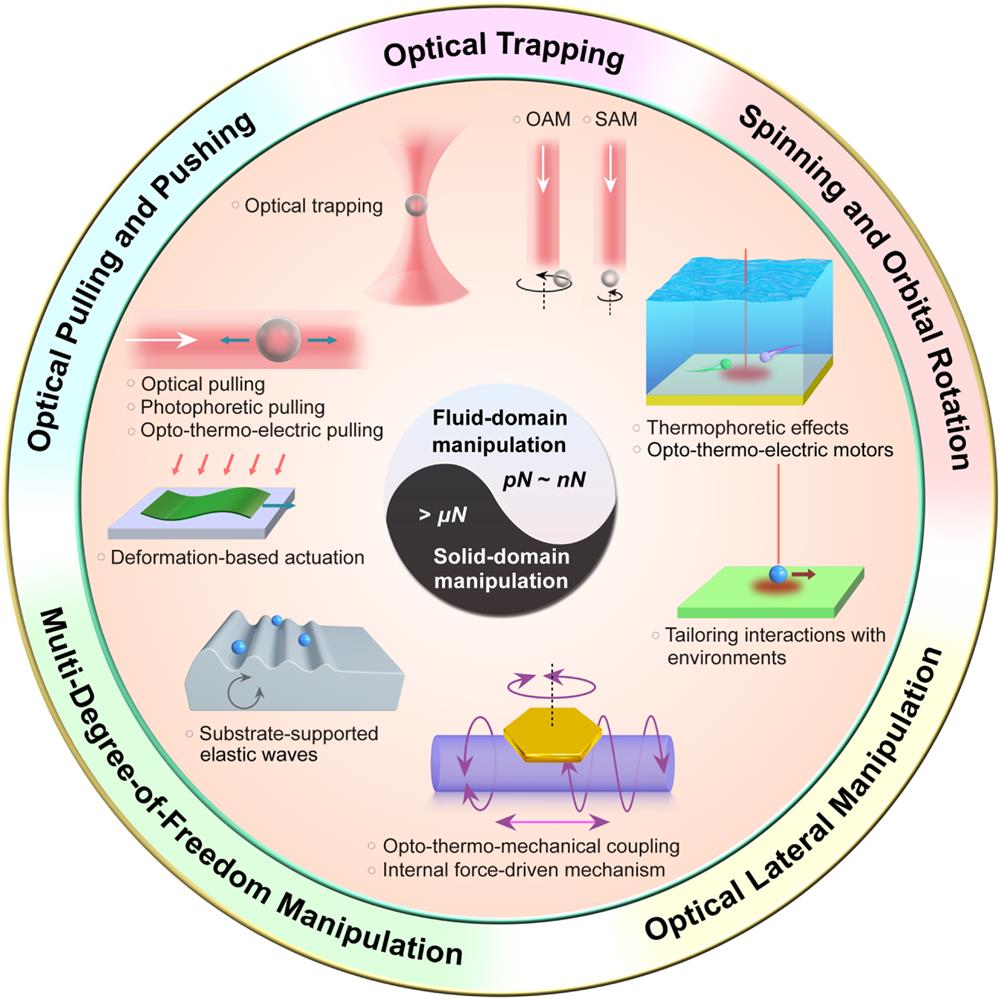
Fig. 1. Overview of optical manipulations in fluid domains and solid domains. Optical manipulations generally include optical trapping, pulling and pushing, lateral manipulation, spinning and orbital rotating, and multi-degree-of-freedom manipulation. Optical manipulations in fluid domains are based on light directly induced forces (i.e., optical gradient forces and optical scattering forces) and indirectly induced forces (e.g., photophoretic force and thermal-electric mediated forces) whose amplitudes are typically of the order from pN to nN. In contrast, optical manipulations on solid surfaces need driving forces larger than μN to overcome the tremendous adhesion/friction forces in micro/nano scales. Examples include opto-thermal-elastic forces, pulsed light-induced forces, light-induced forces generated from photoactive polymers, and photothermal deformation-based actuations.
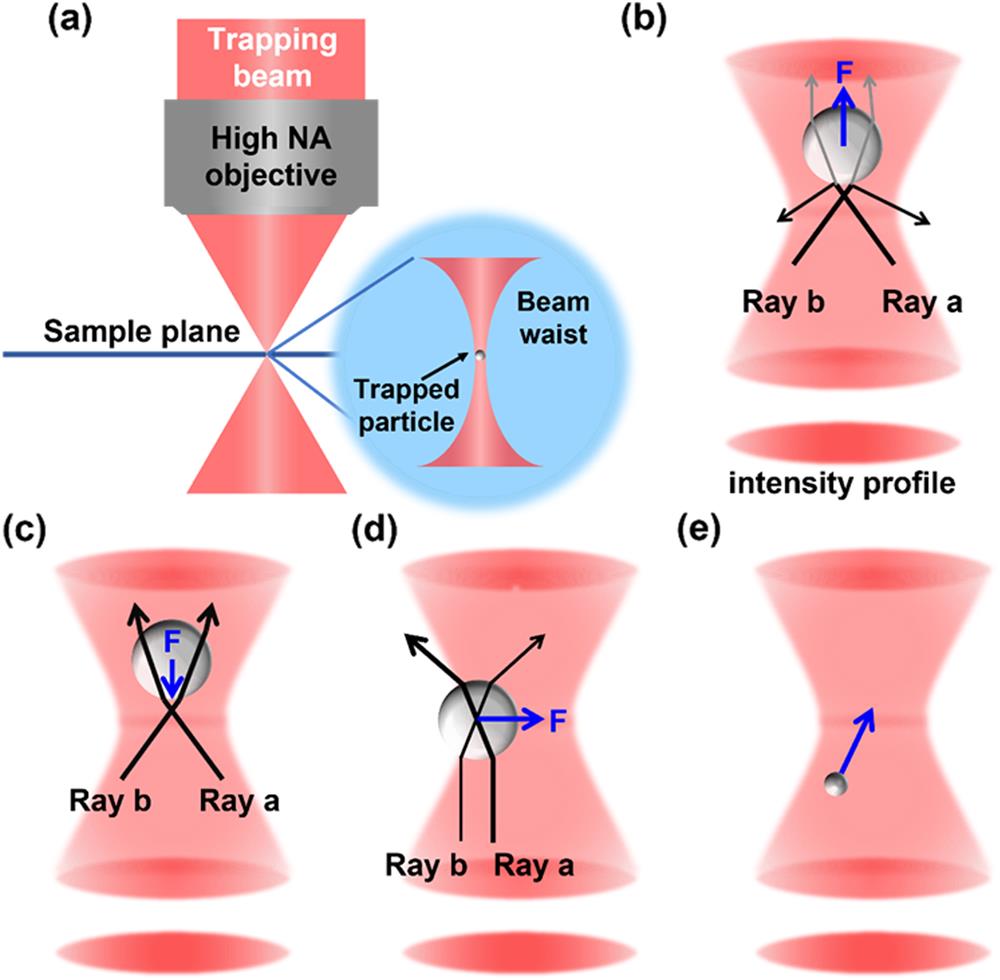
Fig. 2. Illustration of the basic principles of optical force in optical tweezers using ray optics. (a) A trapping beam is focused with the help of a high-NA objective into the sample plane, and a particle can then be trapped in the focal point of the beam due to the large intensity gradients created. The trapping laser is reflected and refracted through the particle and imparts the momentum to the particle. (b) The scattering force produced by laser reflection pushes the particle along the laser propagation direction. (c) The gradient force caused by the light intensity gradient will pull the particle toward the maximum intensity of the laser. (d) Similar arguments along the transverse direction. (e) For Rayleigh particles, the electric field of the light produces an induced dipole in the particles, which are subject to the optical gradient force pointing toward regions of high field gradients. The validity of the ray optics requires that the particle size is much larger than the wavelength, which is to roughly say at least one order of magnitude larger.
Fig. 3. Experimental schematic of the conventional optical tweezers. A simple telescope is used to expand the laser beam to fill the back aperture of the objective. The expanded laser beam, reflected by a dichroic mirror, is coupled into the high-NA objective (lower objective in the sketch) and focused into the chamber. The QPD is placed in a conjugate plane of the condenser objective, collecting the interference signal between incident light and forward-scattered light from the sample. LED light is used to illuminate the sample and imaged with a CCD camera.
Fig. 4. Photophoretic force, which is divided into
Fig. 5. Sketch of a micro-object on a substrate driven by elastic waves induced by pulsed light. A point friction force is exerted on the micro-object when the latter moves on the substrate. Adapted from Ref. [91].
Fig. 6. Numerical exemplification of motion dynamics of a micro-object driven by excited elastic waves induced by pulsed light. (a) Sketch of the studied problem. A gold microplate with length and height of 10 µm and 50 nm, respectively, in the
Fig. 7. Conventional optical tweezers. (a) Schematic showing the origin of optical gradient and scattering forces in the Mie regime. Note that when the laser is tightly focused (right panel), the particle is subject to an axially backward radiation pressure. (b) Illustration of the potential well of the optical tweezer and its stability criterion. FWHM denotes the full width at half-maximum of the potential well. (c) Experimental setup of the optical tweezer with 3D feedback cooling. (d) Diagram of the feedback mechanism along one direction in (c). The derivative circuit (
Fig. 8. Plasmonic tweezers. (a) Schematic of particles trapped in potential wells with radius of 1R (left) and 0.8R (right). Lower panels are calculated distribution probability based on the force status of corresponding particles. (b) Focused SPP trapping of Mie metallic particles via generated plasmonic virtual probe. The glass substrate satisfies the Kretschmann coupling condition. (c) Patterned SPPs for parallel trapping of colloids. (d) Detected particle displacements in an optical tweezer on a glass substrate (left) and upon a plasmonic nanogap (right). (a) Adapted from Ref. [14]. (b) Adapted from Ref. [112]. (c) Adapted from Ref. [116]. (d) Adapted from Ref. [120].
Fig. 9. Resonance dielectric tweezers. (a) Schematic of a 1D silicon photonic crystal resonator used for optical trapping. (b) Simulated mode profile of the photonic crystal resonator in (a) at resonance. The electric field magnification and localization are characteristic of the cavity mode of a dielectric resonator. Black arrows denote the magnitude and direction of the local optical force. (c) Schematic of the multiplexed optical trapping based on an all-dielectric metasurface supporting quasi-bound states in the continuum in each of its unit cells. Nanoparticles would be trapped at the gaps of the elliptical nanoantenna pairs (the unit cell), where the local electric fields are strongly enhanced due to the lack of out-coupling channels. (d) SEM image of a nanocuboid array fabricated with amorphous silicon supporting anapole modes. (e) Calculated profile of the optical force upon 100 nm bead in the plane
Fig. 10. Integrated optical tweezers. (a) Schematic of a micro-ring system with a trapped dielectric particle moving around on top of it. Incident light is coupled from the left port into the bus waveguide. (b) Recorded time-dependent
Fig. 11. Thermophoretic tweezers. (a) Experimental setup of the optical vortex pipeline for long-range particle delivery. Inset shows a photograph of the transverse trapping of an absorbing particle that is slightly displaced from the vortex center due to gravitational drag. (b) Schematic of remote particle manipulation. (c) Calculated and measured light intensity profile along the axial direction within a paraxial aberrated focus.
Fig. 12. Opto-thermoelectric tweezers. (a) Schematic of the solution components when added with CTAC. Left to right: colloidal particles decorated with CTAC, CTAC micelles,
Fig. 13. Opto-thermoelectrohydrodynamic tweezers. (a) Optical setup of the hybrid electro-thermoplasmonic tweezer. The arrows indicate the direction of the ETP flow. (b) Mapping and vectorial plot of the measured flow velocity. The maximum flow velocity exceeds
Fig. 14. Optical axial manipulation: pulling using light. (a) Optical solenoid beams with tilted wavefronts. From left to right are three circumstances where the local
Fig. 15. Optical lateral manipulation enabled by light field and structural asymmetry. (a) Schematic of light carrying SAM (left) and OAM (right). (b) Rotation of a nanodumbbell levitated in a circularly polarized beam. (c) Power spectrum density of the rotational motion in (b). The peak at 2.2 GHz corresponds to the rotation frequency of 1.1 GHz. (d) Experimental setup for producing holographic optical traps carrying transverse phase gradients. (e) Relationship between the traverse speed of a captured colloidal particle
Fig. 16. Spiral, rotational, and translational motions induced by actuator-supported elastic waves. (a) Illustration of the driving mechanism in the opto-thermoelastic scheme, which centers around the interplay between surface friction and the thermally induced elastic waves, with the enabling elements being pulsed light, absorption, and the heating and cooling cycles. (b) Schematic showing the zoomed-in configuration of a fiber-microplate system. The shaded region denotes the contact surface at which the friction force functions as a “fence,” blocking the transmission of thermally excited elastic waves. The inset table links the motion states with the relation between the effectively absorbed power
Fig. 17. Other motion patterns observed on the fiber–plate system. (a) Sequential optical images showing the in-plane rotation of a gold microplate on a microfiber with continuous light pulse injection. The base plane of the gold plate coincides with the
Fig. 18. Particle propulsion via light illumination. (a) Illustration of the nanoprinting process where particles are released from the flexible donor substrate and transported to the receiver plate. Insets are SEM images of particles deposited on the receiver plate. (b) Simulated temperature profile and the thermal expansion of the PDMS layer via plasmonic absorption of a gold particle. An escaping force from the van der Waal’s adhesion is provided by the thermal expansion of the PDMS layer on the donor substrate. Scale bar: 500 nm. (c) Laser modification of the gold nanoprisms deposited on nonwettable substrate. The laser fluence increases from top to bottom in the left panel and from left bottom to right top in the right panel. Beyond a certain threshold, the deposited particles would be propelled from the substrate. (d) Schematic of the laser-induced forward transfer of nanopatterned particles from a donor to a receiver substrate. (e) Dark field microscopic image of arrays of transferred particles on the receiver substrate. The adopted laser beam has a square profile. (f) SEM image showing the sub-features contained in a single square pixel shown in (e). The initial patterned geometry on the donor substrate was obtained via nanosphere lithography, which explains the hexagonal alignment of particles transferred on the receiver substrate. (g) SEM images showing the propulsion of deposited gold materials with minor ablation upon femtosecond light illumination. The laser pulse intensity is
Fig. 19. Photothermal deformation-based manipulation. (a) Curling of the SWNT-PC dual-layer structure induced by the CTE mismatch upon light–thermal effects. (b) Schematic showing selective activation of the elementary building block of the artificial muscle. The initial GO-PMMA bilayer structure can be laser-modified into rGO-PMMA (indicated by the shaded areas) to form “joints” of the artificial muscle. Au nanorods are embedded in the bilayer matrix to enhance the light–thermal effects, which would also exhibit wavelength selectivity. (c) Sketch of the
Fig. 20. Tailoring interactions with environments. (a) Schematic of the in-plane photon nudging in the “on” state of the optothermal gate. (b) Rotation, translation, and versatile particle assembly achieved by the optothermally gated photon nudging. Scale bar: 3 µm. (c) Generation and transportation of germanium particles within a laser-liquidized region of a silica fiber. (d) Construction of in-fiber p-n homojunctions in a dual-core fiber. The originally separated p and n type particles are both drawn to the laser spot and become contacted. (e) Schematic illustrating the self-assembly of liquid filament upon nanosecond laser illumination with prescribed periodic perturbation. The light-powered dewetting process leads to the breakup of liquid filaments into periodically arranged hierarchical nanoparticles. In comparison, without preassigned perturbations, the multimode Rayleigh–Plateau instability would result in randomly distributed particles (left top inset). (f) Time evolution of the filament geometry with the prescribed perturbation. The fine lines connecting neighboring first-order particles would dewet into second-order particles shown in (e). (a), (b) Adapted from Ref. [298]. (c), (d) Adapted from Ref. [301]. (e), (f) Adapted from Ref. [307].
Fig. 21. Optical tools for analyzing biochemical molecules and cells. (a) Schematic of a dumbbell geometry formed by a DNA molecule tethered to dielectric particles held in two separate optical tweezers. While the stiffer trap (left) is responsible for stretching the DNA molecule by steering away (via acousto-optic deflector) from the optical trap on the right, the weak trap establishes a force clamp where the particle is held at a zero-stiffness zone offset from the trap center. (b) Recorded temporal evolution of the DNA extension exhibiting step-wise behaviors. The experiment is conducted in a constant-force modality with 18 pN assisting load. The system noise is controlled below 1 Å for high spatial resolution. (c) Schematic of an angular optical tweezer for controlling and measuring the torque in the transcription process against the upstream supercoiling (–) and downstream supercoiling (+). The quartz cylinder is aligned with its extraordinary axis parallel to the transverse plane, so that an alignment torque is exerted on it in the linearly polarized light field. (d) Torque-extension relation in a transient pulsed form. The tested RNA polymerase would receive a pulsed resisting torque while transcribing. When the resisting torque is too large or lasts sufficiently long (pulse duration 5 s versus 0.5 s), the transcription would be deactivated, which is manifested in the extension traces. (e) Experimental setup of a plasmonic nanopore designed for optically trapping and sequencing DNA molecules. The strongly enhanced near fields at the tips of bowtie antennas provide both the anchoring sites for the molecule and the excitation signals for Raman spectroscopy of the exposed nucleotide. Consecutive on and off states of incident light enable the stepwise translocation of the DNA molecule under the electric bias across the nanopore. (f) Illustration of a “fleezer” system in a confocal configuration. The trapping beams and the excitation beam are spatially separated, with the former capturing the particle handlers and the latter focusing on the fluorescently labeled samples. (g) Signals recorded in both the optical tweezer and the fluorescence channels. The jumps shown in the upper panel correspond to the opening of the mRNA hairpin by one-codon steps. The spikes in the lower panel indicate the binding of fluorescently labeled EF-G. (a), (b) Adapted from Ref. [317]. (c), (d) Adapted from Ref. [319]. (e) Adapted from Ref. [324]. (f), (g) Adapted from Ref. [325].
Fig. 22. Measurement of the instantaneous velocity of Brownian particles in an optical tweezer platform. (a) Measured MSD (symbols) of a trapped particle compared to Einstein’s deduction (dashed lines) and the prediction of the Langevin equation (solid lines) at different air pressures. (b) MSD of a Brownian particle at short time scales (
Fig. 23. Photophoretic trapping for volumetric display. (a) Schematic illustration of the photophoretic trap display. Individual absorptive particles can be levitated in the dark region of a bottle beam (trapping beam) and scanned to form images at a speed beyond what is required by the persistence of vision. RBG lasers are collinearly aligned with the trapping beam to illuminate the trapped particle. (b), (c) Three-dimensional images exemplifying the capability of the proposed volumetric display. (b) The as-produced images can be received from arbitrary angles free of clipping. (c) “Wrap around” images can be created surrounding a 3D-printed arm model, whose imaging effect is not affected by the obstruction of real physical objects as what would appear in conventional holograms. Adapted from Ref. [342].
Fig. 24. (a) Schematic of the fiber–plate system used for laser scanning. The gold plate as the rotor in the machinery exhibits high reflectivity at the incident wavelength, thus functioning as a micromirror that reflects the light beam as it rotates. (b) Sequential optical images showing the laser beam deflected with time. The rotation speed of the micromirror is 0.1 rad/s. (c) Comparison between the experimentally measured and calculated beam deflection with time. The stepwise feature can be clearly seen in the experimental data. (d) Schematic of a fiber-based photonic integrated circuit with plasmonic nanowires functioning as the moving elements. (e) Basic setup of the on-chip realization of opto-thermo-mechanical actuation based on waveguide platforms. (f) Schematic of on-chip multiplexed actuation of plasmonic vehicles. (a)–(c) Adapted from Ref. [35]. (d) Adapted from Ref. [36].
|
Table 1. Properties of Different Light-Induced Forces/Effects.


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20