
Yuan Zhou, Ying Chen, Guobao Jiang, Zhiyou Wang, Yingchang Zou, Shixun Fan, Dapeng Fan, Fangrong Hu. Nonlinearity Problem Analysis of Target Tracking Based on Rotational Double Prisms[J]. Acta Optica Sinica, 2021, 41(18): 1823002
- Acta Optica Sinica
- Vol. 41, Issue 18, 1823002 (2021)
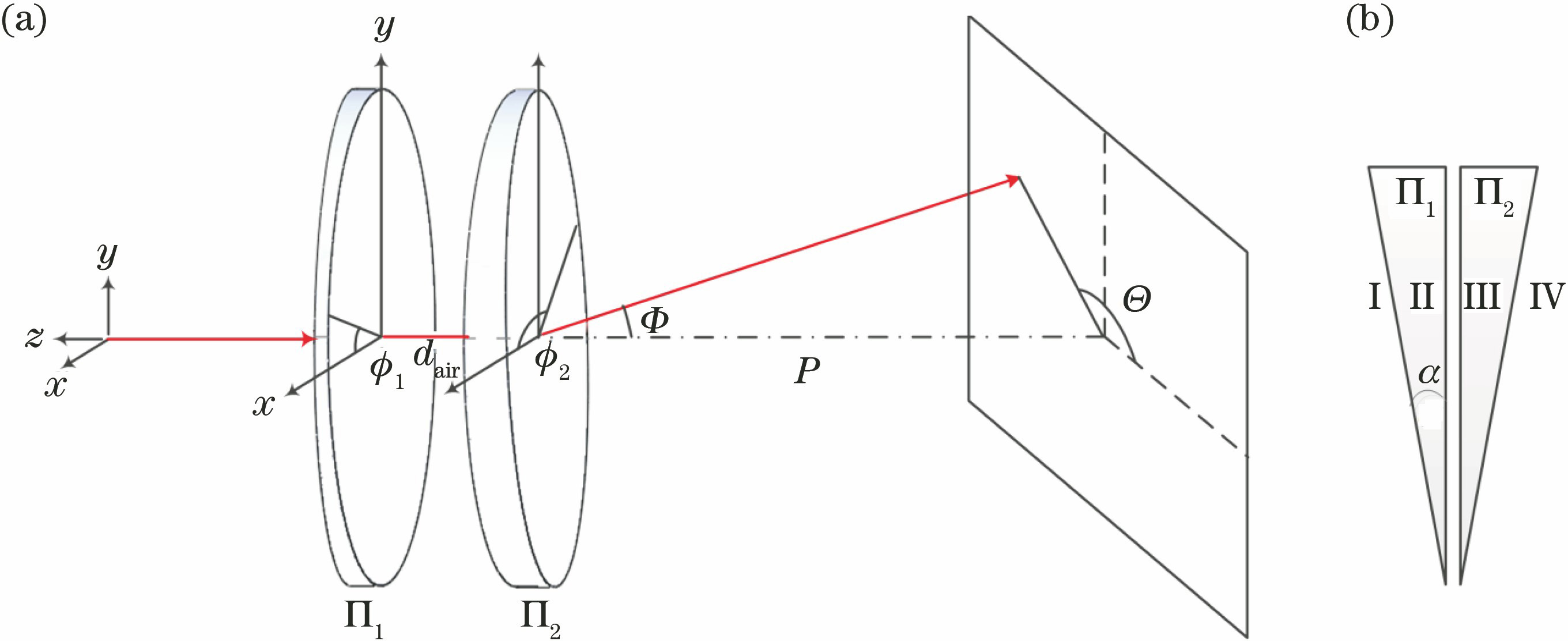
Fig. 1. Schematic for rotational-double-prism-based beam steering system. (a) Description of the system parameters; (b) system arrangement
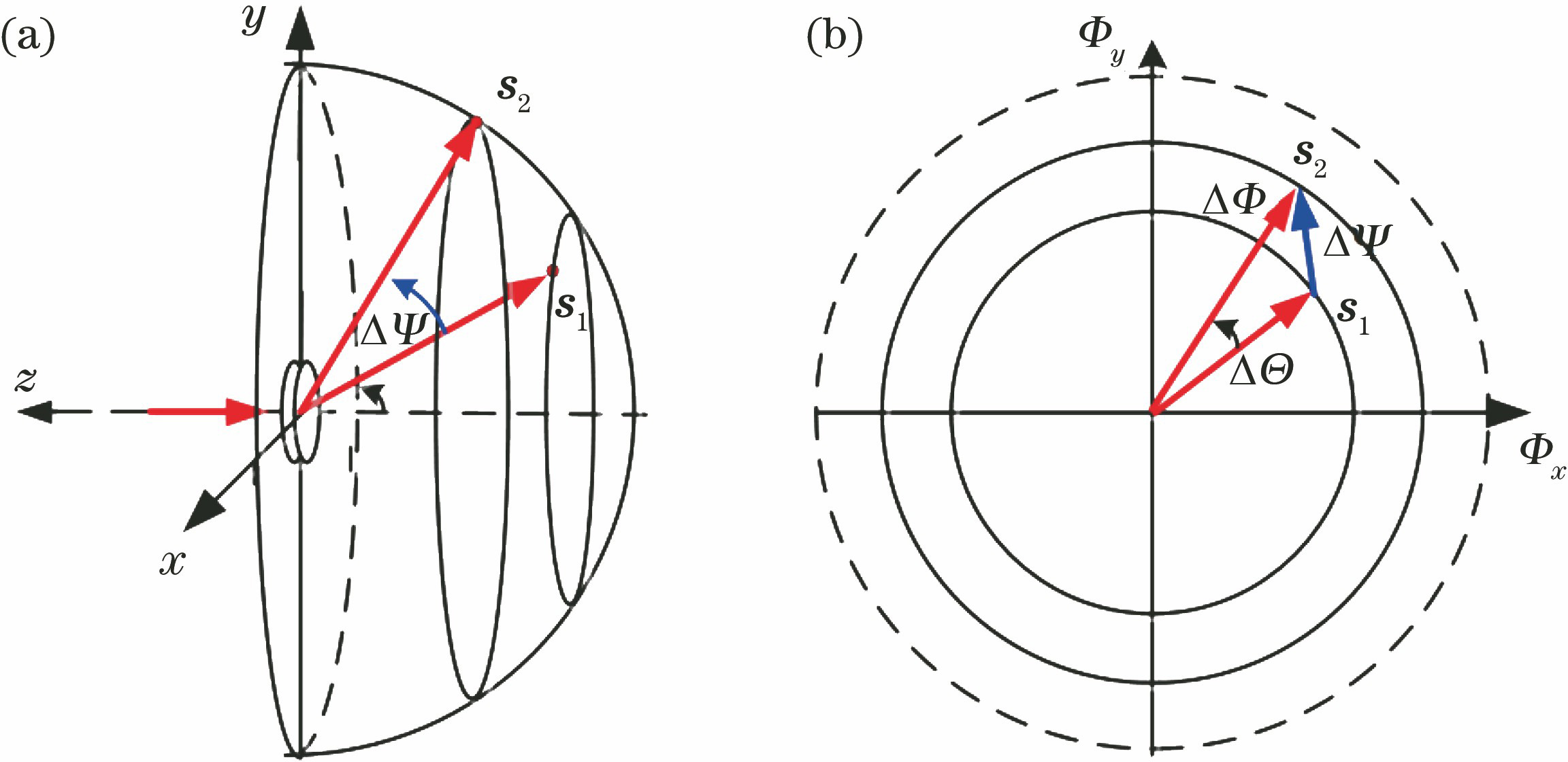
Fig. 2. Slewing angle ΔΨ of outgoing beam. (a) Schematic for beam steering in three-dimensional space; (b) schematic for beam steering in polar coordinate
Fig. 3. Slewing angle ΔΨ of direction for target with radial movement. (a) Schematic for beam steering in three-dimensional space; (b) schematic for beam steering in polar coordinate
Fig. 4. Ratio of prisms’ rotational speed to beam slewing rate for tracking target with radial movement. (a) Glass prism system; (b) germanium prism system
Fig. 5. Slewing angle ΔΨ of direction for target with tangential movement. (a) Schematic for beam steering in three-dimensional space; (b) schematic for beam steering in polar coordinate
Fig. 6. Change of ratio of prisms’ rotational speed to beam slewing rate for tracking target with tangential movement
Fig. 7. Decomposition of instantaneous slewing rate of outgoing beam. (a) Schematic for beam steering in three-dimensional space; (b) schematic for beam steering in polar coordinate
Fig. 8. Ratio of prisms’ rotational speed to beam slewing rate for tracking target with the glass prism system (based on the first group of inverse solutions). (a) θ=0°; (b) θ=180°; (c) θ=30°; (d) θ=210°; (e) θ=60°; (f) θ=240°; (g) θ=90°; (h) θ=270°; (i) θ=120°; (j) θ=300°; (k) θ=150°; (l) θ=330°
Fig. 9. Ratio of prisms’ rotational speed to beam slewing rate for tracking target with the glass prism system (based on the second group of inverse solutions). (a) θ=0°; (b) θ=180°; (c) θ=30°; (d) θ=210°; (e) θ=60°; (f) θ=240°; (g) θ=90°; (h) θ=270°; (i) θ=120°; (j) θ=300°; (k) θ=150°; (l) θ=330°
Fig. 10. Moving direction of target with the same angle θ to radial direction
Fig. 11. Variations of ratio of prisms’ rotational speed to beam slewing rate as a function of Φ and θ for the glass prism system. (a)
Fig. 12. Maximum ratio

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20