
Yingjie Liu, Fengbao Yang, Peng Hu. Parallel FPN Algorithm Based on Cascade R-CNN for Object Detection from UAV Aerial Images[J]. Laser & Optoelectronics Progress, 2020, 57(20): 201505
- Laser & Optoelectronics Progress
- Vol. 57, Issue 20, 201505 (2020)
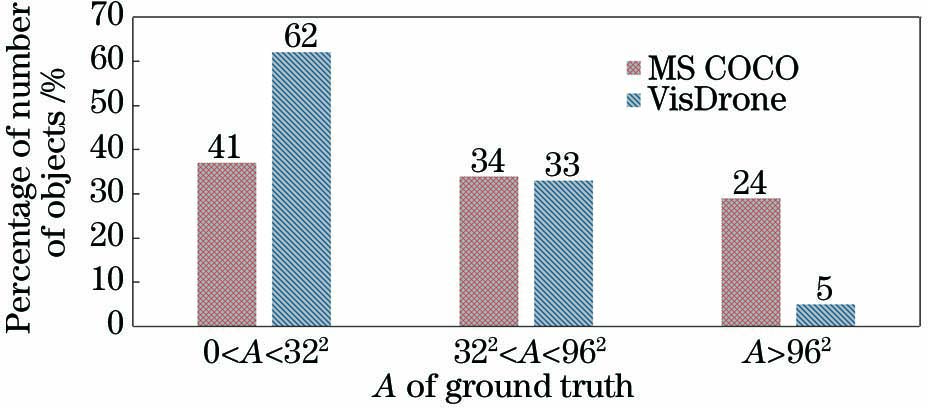
Fig. 1. Object area versus number of objects
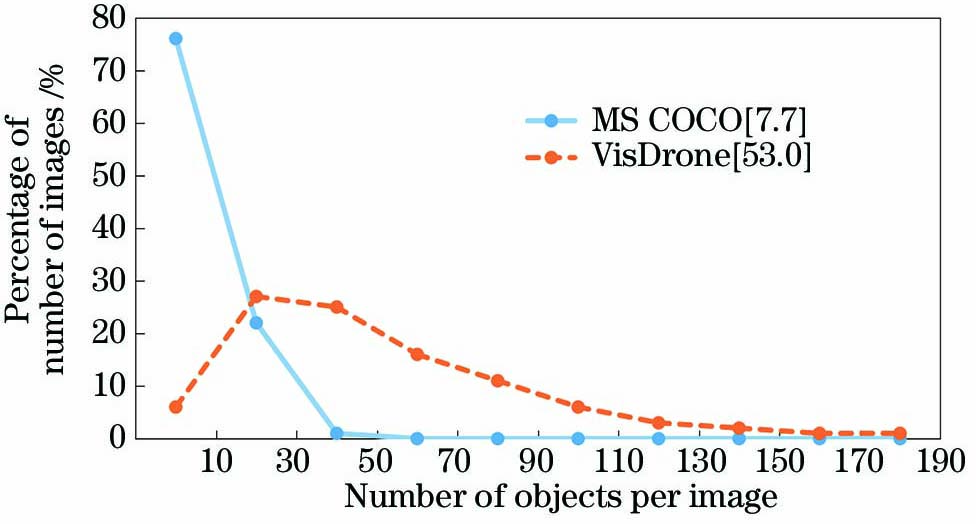
Fig. 2. Number of objects per image versus percentage of number of images
Fig. 3. Example of actual aerial images
Fig. 4. FPN frame
Fig. 5. Parallel FPN frame
Fig. 6. Structure of Cascade R-CNN
Fig. 7. Change of positive proposals in every stage. (a) IoU threshold is 0.5; (b) IoU threshold is 0.6; (c) IoU threshold is 0.7
Fig. 8. Overall framework of proposed model
Fig. 9. Visual detection results of aerial images
|
Table 1. Comparison of classical algorithms %
| |||||||||||||||||||||||
Table 2. Impact of number of cascading stages on parameters %
|
Table 3. Comparison of anchor size of proposed algorithm
|
Table 4. Detection result of multi-scale training

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20