
Dewen Cheng, Hailong Chen, Yongtian Wang, Tong Yang. Mathematical Description and Design Methods of Complex Optical Surfaces[J]. Acta Optica Sinica, 2023, 43(8): 0822008
- Acta Optica Sinica
- Vol. 43, Issue 8, 0822008 (2023)
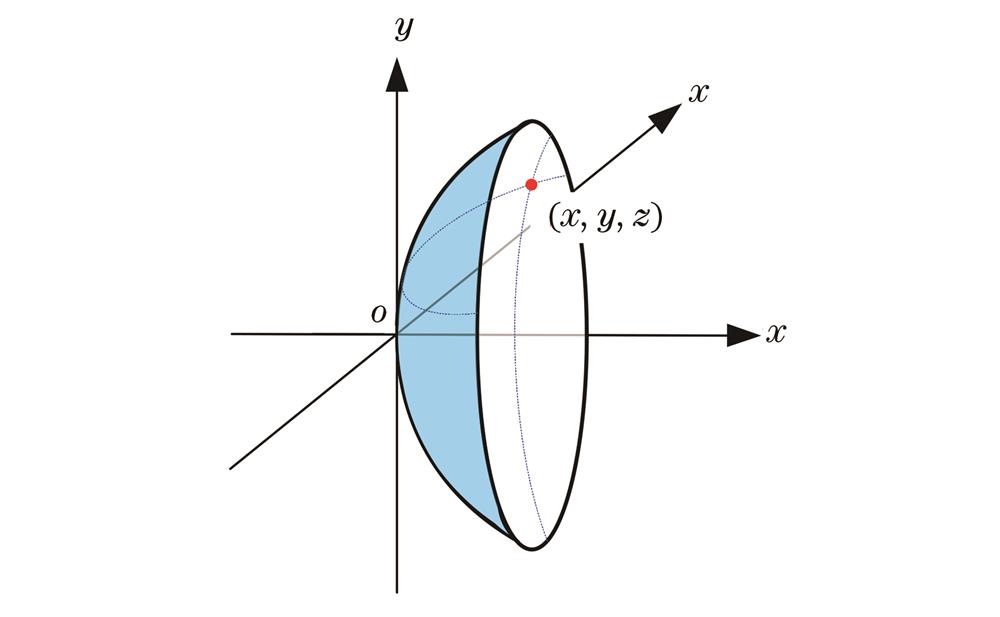
Fig. 1. Description of optical surface based on cartesian coordinate system
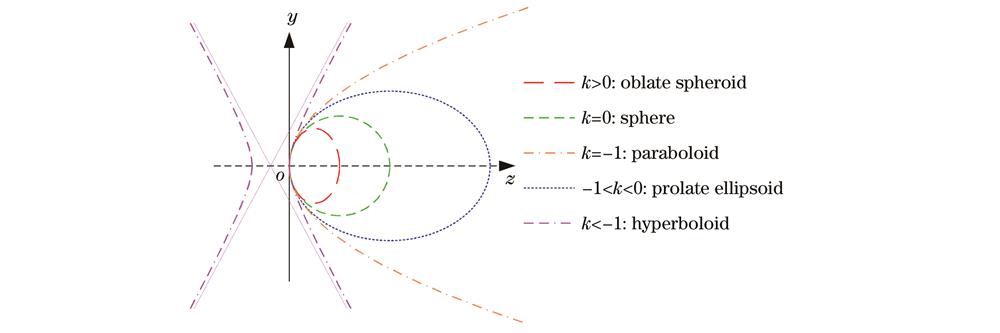
Fig. 2. Profiles of different surface types in yoz plane corresponding to different values of k
Fig. 3. Off-axis conic base surface defined with off-axis angle[20]
Fig. 4. Schematic diagram of ASAS
Fig. 5. Ultra-thin reflective imaging system[16]. (a) Optical layout of initial system using even aspheric surface; (b) optical layout of system using ASAS; (c) MTF curves of system using ASAS
Fig. 6. Catadioptric ultra-wide-angle imaging system[73]. (a) Optical layout of system; (b) MTF curves of system using even aspheric surface; (c) MTF curves of system using ASAS; (d) MTF curves of system after fitting ASAS to even aspheric surface
Fig. 7. Profile of APS in yoz plane
Fig. 8. Ultra-short throw ratio projection objective using APS[18]. (a) Layout of system; (b) distortion grid of system; (c) MTF curves of system
Fig. 9. Schematic diagram of SSPS[22]
Fig. 10. Off-axis system with two mirrors and three reflections[22]. (a) Optical layout of system; (b) design result using traditional xy polynomial surface; (c) design result using SSPS; (d) RMS wavefront error of system using traditional xy polynomial surface; (e) RMS wavefront error of system using SSPS; (f) MTF curves of system using SSPS; (g) distorted grids of system using SSPS
Fig. 11. Off-axis system with three mirrors and four reflections[22]. (a) Optical layout of system; (b) design result using traditional xy polynomial surface; (c) design result using SSPS; (d) RMS wavefront error of system using traditional xy polynomial surface; (e) RMS wavefront error of system using SSPS
Fig. 12. Description of first-order data of system using freeform surface[76]. (a) Optical layout of freeform prism; (b) optical layout of system using best-fitting double-curvature biconic surface; (c) Gaussian curvature distribution of best-fitting conic surface of S3; (d) Gaussian curvature distribution of best-fitting double-curvature biconic surface of S3
Fig. 13. Fitting error diagram of xy polynomial surface of double-curvature biconic surface converted into xy polynomial surface by different methods[76]. (a) Least squares method; (b) singular value decomposition method; (c) xy polynomial surface of double-curvature biconic surface is directly converted into x-axy polynomial surface; (d) converted x-axy polynomial
Fig. 14. Schematic diagrams of Alvarez system. (a)(d) System is equivalent to negative lens and diverges beam; (b)(e) initial statement of system can be designed as parallel glass plate state or with initial optical power; (c)(f) system is equivalent to positive lens and converges beam
Fig. 15. Optimized Alvarez system. (a) Theoretical optical power P is -10 m-1; (b) theoretical optical power P is -4 m-1;(c) theoretical optical power P is 2 m-1
Fig. 16. Optical power and astigmatism distributions of single lens in optimized Alvarez system. (a) Distribution of optical power; (b) distribution of astigmatism
Fig. 17. Off-axis conic surface[63]. (a) Off-axis ellipsoid; (b) off-axis hyperboloid
Fig. 18. Optical properties of conic mirrors[19]
Fig. 19. Ideal imaging off-axis three-mirror system using focus transfer[19]. (a) Paraboloid-ellipsoid-ellipsoid; (b) paraboloid-hyperboloid-ellipsoid
Fig. 20. Design process of compact off-axis three-mirror system[19]. (a) Optical layout of initial system using CBS; (b) RMS spot diagram of initial system; (c) optical layout of design using CBR; (d) RMS wavefront error of system using CBR; (e) optical layout of design result using CBN; (f) RMS wavefront error of system using CBN; (g) RMS wavefront error of system after CBNs are converted to traditional xy polynomial surfaces
Fig. 21. Process of integrating two surfaces into single surface[21]. (a) Coordinates and the normals of sampling points from two original surfaces; (b) local coordinate system of base sphere and freeform surface; (c) freeform surface is obtained by fitting based on the normal of discrete points and residual
Fig. 22. NURBS surface fitted with Peaks surface based on MBA algorithm[15]. (a) Peaks surface to be fitted; (b) result of 3rd fitting; (c) result of 4th fitting; (d) result of 5th fitting
Fig. 23. Schematic diagram of ray tracing process[15]
|
Table 1. NURBS inversion algorithm's efficiency[15]

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20