The lightweight type-aware light detection and ranging (LiDAR) is an active three-dimensional (3D) optical imaging technology used for environment perception. Mounted on platforms such as vehicles and aircrafts, the type-aware LiDAR performs as the eye to capture and process environmental information, providing real-time and accurate 3D data for target detection, identification and decision making. Compared with the traditional surveying and mapping LiDAR, the type-aware LiDAR has the advantages of smaller volume, larger amount of data, higher transmission rate and higher-resolution 3D imaging. As the demand of 3D sensing grows, the lightweight type-aware LiDAR technology becomes one of the hotspots in the future development. The type-aware LiDAR is mainly applied in the fields of aerospace exploration and autonomous driving. To meet the requirements of miniaturization and intelligence, the key technologies of type-aware LiDAR are developing toward lightweight system design. In this paper, the current key technologies and typical applications of lightweight type-aware LiDAR are summarized, and the development trend of key technologies is forecasted.
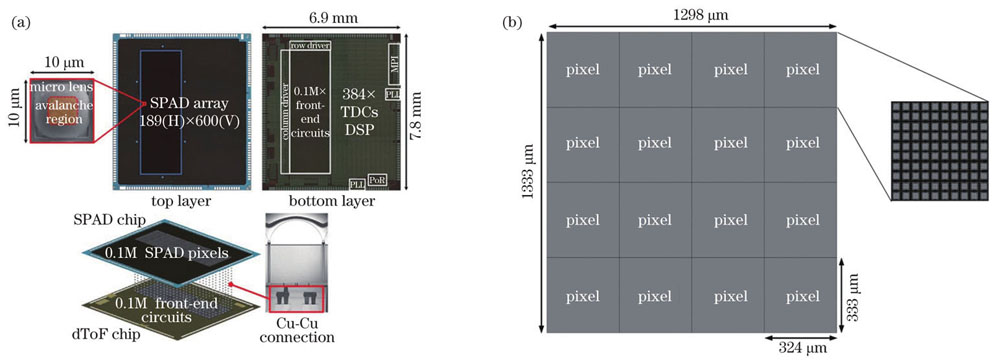
Firstly, the integration-level LiDAR has been greatly contributed by the development of fiber and semiconductor lasers, single photon detector, and micro-electro-mechanical system (MEMS) and optical phased array (OPA) laser scanner. Fiber laser has been employed for aerospace application with adjustable repetition rate of 5-50 kHz. With an inherently safer wavelength for autonomous driving application, vertical cavity surface emitting laser (VCSEL) of 1550 nm has better carrier confinement than semiconductor laser of 905 nm. Single photon avalanche diode (SPAD) array with hundreds of pixels has been developed for 3D imaging on femtosecond magnitude. The 4 pixel×4 pixel silicon photomultiplier (SiPM) has been developed to capture light intensity information, whose single pixel is composed of 100 SPADs (Fig. 1). To facilitate integration, scan unit of type-aware LiDAR is gradually developing from the traditional multi-beam mechanical scanning type to MEMS, OPA, and flash LiDAR (Table 1), and the ranging system is developing toward system on chip (SoC) technology.
Secondly, the ranging performance of LiDAR has a significant influence on the quality of point cloud, which is elaborated from two aspects of ranging system and ranging algorithm. The ranging system can be categorized as time-to-digital converter (TDC) and analogue-to-digital converter (ADC) according to the implementation schemes of time discrimination. In order to miniaturize the ranging system, the TDC/ADC hybrid SoC is designed to achieve long-range detection (Fig. 4). Toshiba has developed a 40-channel LiDAR SoC with a ranging error less than 0.25% and a distance ranging from 25 m to 225 m. Subsequently, the ranging algorithms for saturated, weak, and multiple echo waveforms are summarized separately. The selection of algorithms depends on the signal situation and application condition. With the recent developments, SoC is becoming the mainstream form of ranging system and the ranging algorithms need to evolve for processing more complicated signal.
Thirdly, the research status of pointing error correction of type-aware LiDAR is introduced, including the correction of scanning mechanism internal errors and system installation errors. The scanning mechanism internal errors can be eliminated by correction function obtained from mechanism analysis (Fig. 6), which is elaborated in various scanning mechanism of prism, MEMS and OPA. The system installation error is reduced by modeling the difference between the actual laser path and the ideal path, as well as adopting model optimization methods include network method, two-face method and length-consistency method. The future research of the pointing error correction needs more generalization and process standardization.
Fourthly, lightweight type-aware LiDAR has been employed in versatile applications. For autonomous driving application, low cost and potential for integration are required (Fig. 9). Mechanical (ranging 100-500 m, accuracy 2-7 cm) and hybrid solid-state scanning systems (ranging 150-500 m, accuracy up to 1 cm) are currently the prevailing types of LiDAR loaded on autonomous vehicles. As for space application, the flash LiDAR is commonly utilized in space rendezvous and hazard avoidance tasks due to its high directivity, high resolution and high precision (Table 3 and Table 4).
Lightweight type-aware LiDAR has become the development frontier and research hotspot in the field of intelligent sensors. In the past decade, hybrid-solid MEMS LiDAR as a mature product has sprung up. As the integrated chip technology fast grows, SoC technology perhaps becomes a mainstream solution to performance improvements of lightweight type-aware LiDAR with compactness, high resolution and high speed. In the future, the on-chip technology integrated with signal processing algorithm, state-solid scanning mechanism combined with universal correction method, and mutual promotion of technologies between civil and aerospace applications, will motivate the development of lightweight type-aware LiDAR.