
Huican Lin, Qiang Lü, Heng Wei, Yang Wang, Bing Liang. Quadrotor Autonomous Flight and Three-Dimensional Dense Reconstruction Based on VI-SLAM[J]. Acta Optica Sinica, 2018, 38(7): 0715004
- Acta Optica Sinica
- Vol. 38, Issue 7, 0715004 (2018)
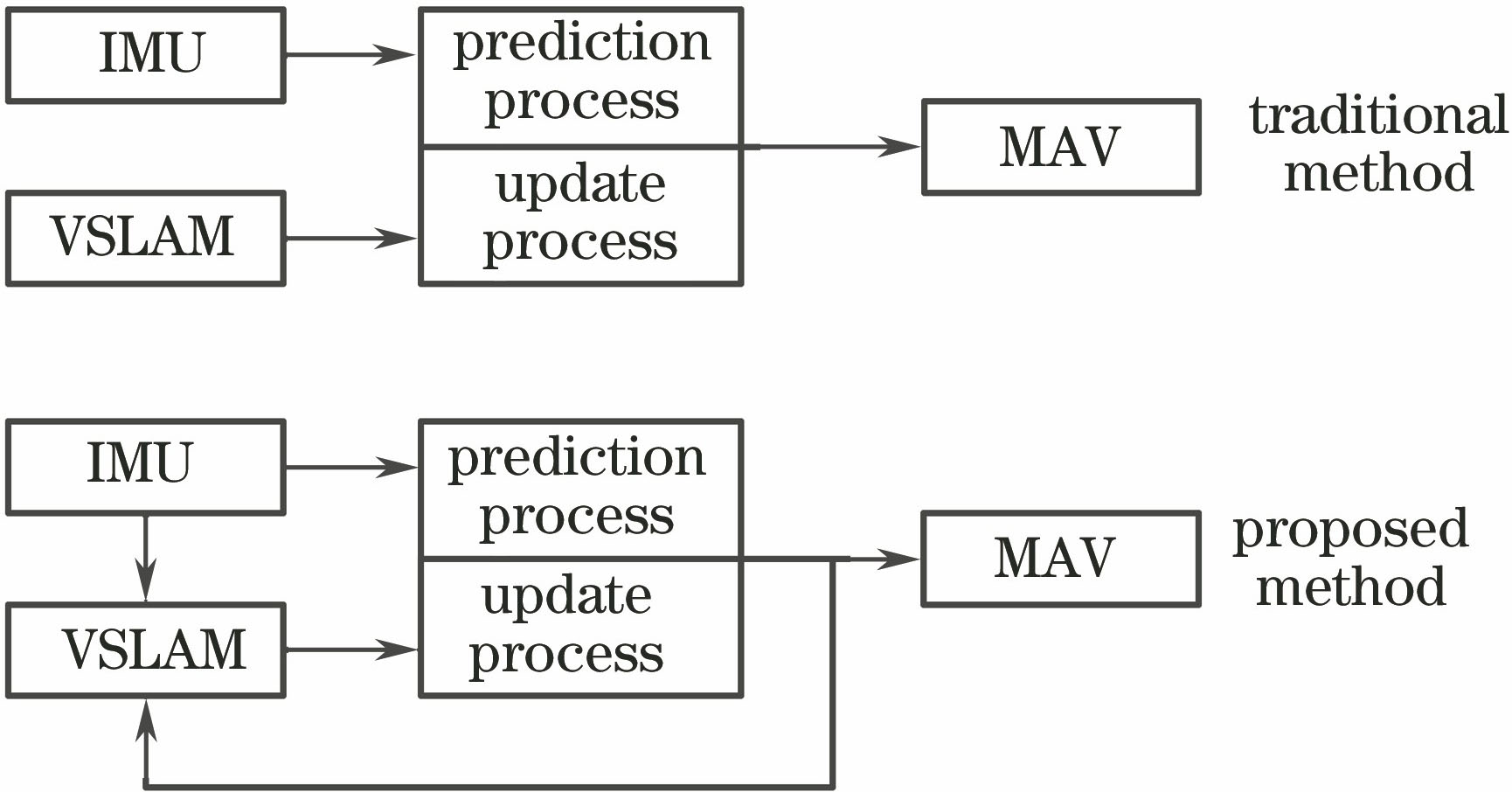
Fig. 1. Fusion framework of VSLAM and IMU
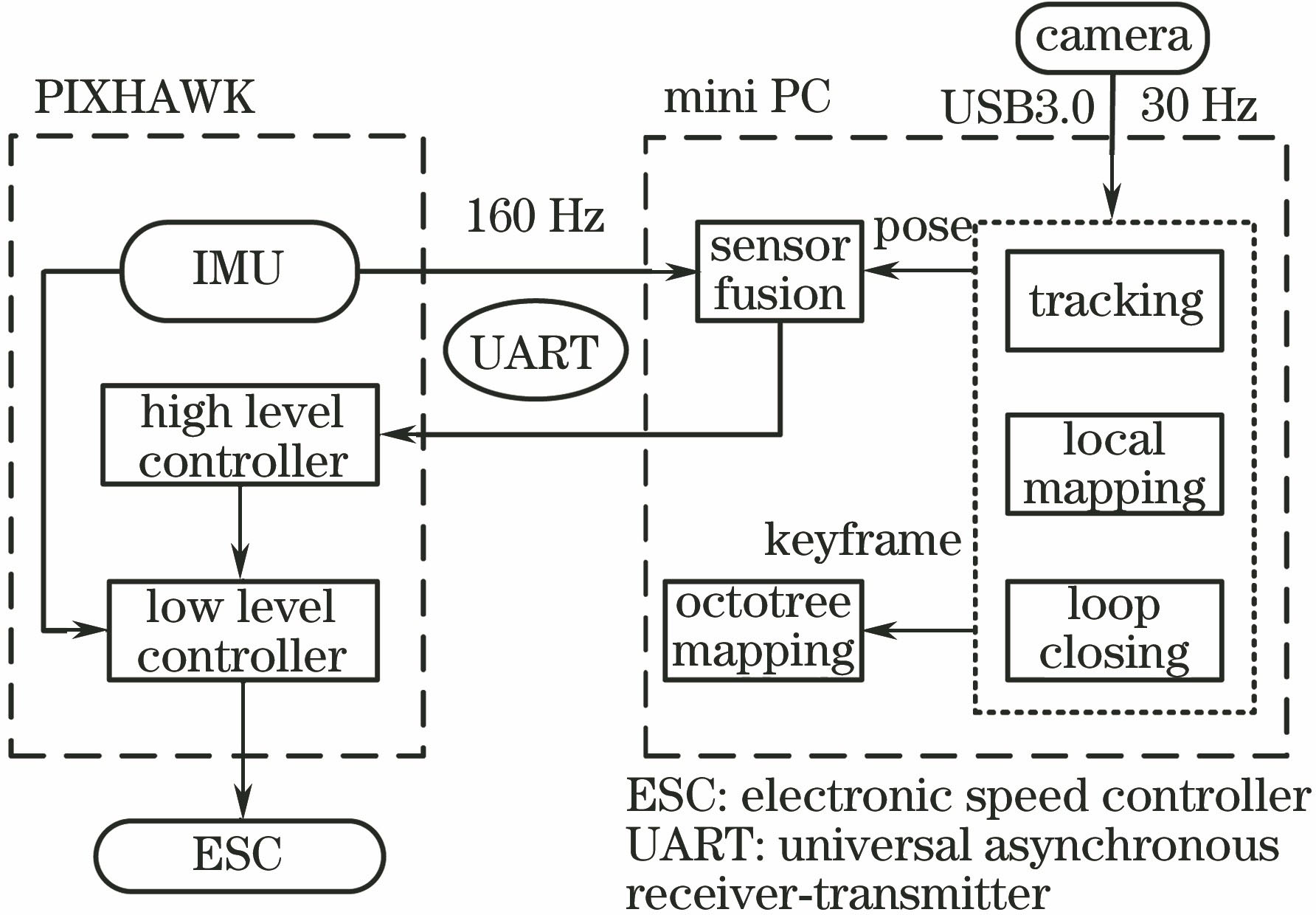
Fig. 2. System framework
Fig. 3. Quadrotor micro aerial vehicle platform
Fig. 4. Comparison of absolute trajectory error
Fig. 5. Trajectory in the process of autonomous take-off and hover. (a) x axis; (b) y axis; (c) z axis; (d) x-y plane
Fig. 6. Three-dimensional trajectory of autonomous take-off and hover
Fig. 7. Three-dimensional dense reconstruction. (a) Reconstruction of V101 data sequence; (b) reconstruction of V102 data sequence;(c) reconstruction of V201 data sequence; (d) reconstruction of MH01 data sequence; (e) reconstruction of real environment
|
Table 1. Comparison between the traditional and proposed fusion frameworkm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20