
Li Liu, Guoqing Ma, Yi Gao, Qiang Wang. Flexible Measurement Technology of Complex Curved Surface Three- Dimensional Shape Robot Based on iGPS[J]. Chinese Journal of Lasers, 2019, 46(3): 0304006
- Chinese Journal of Lasers
- Vol. 46, Issue 3, 0304006 (2019)
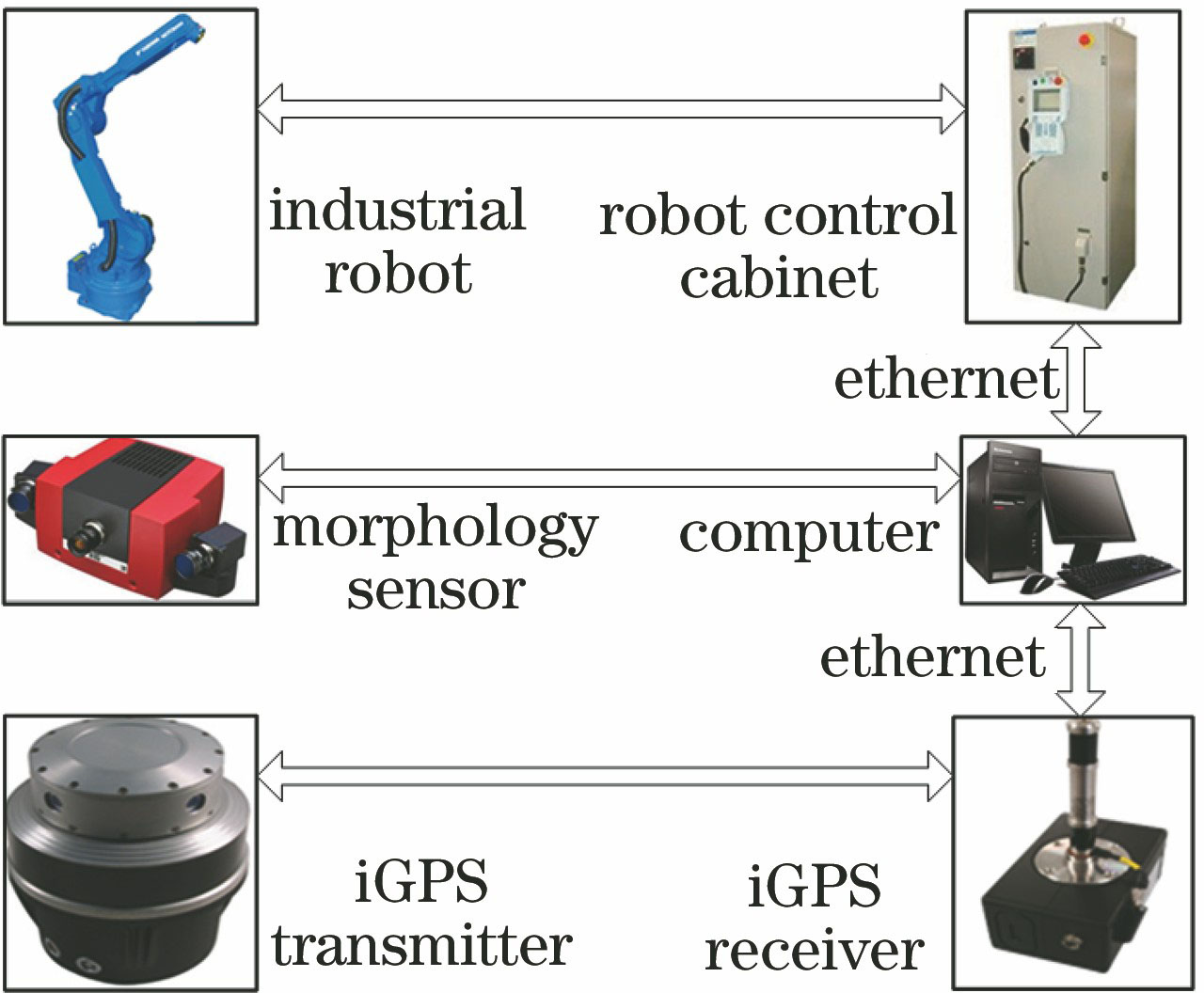
Fig. 1. System composition block diagram
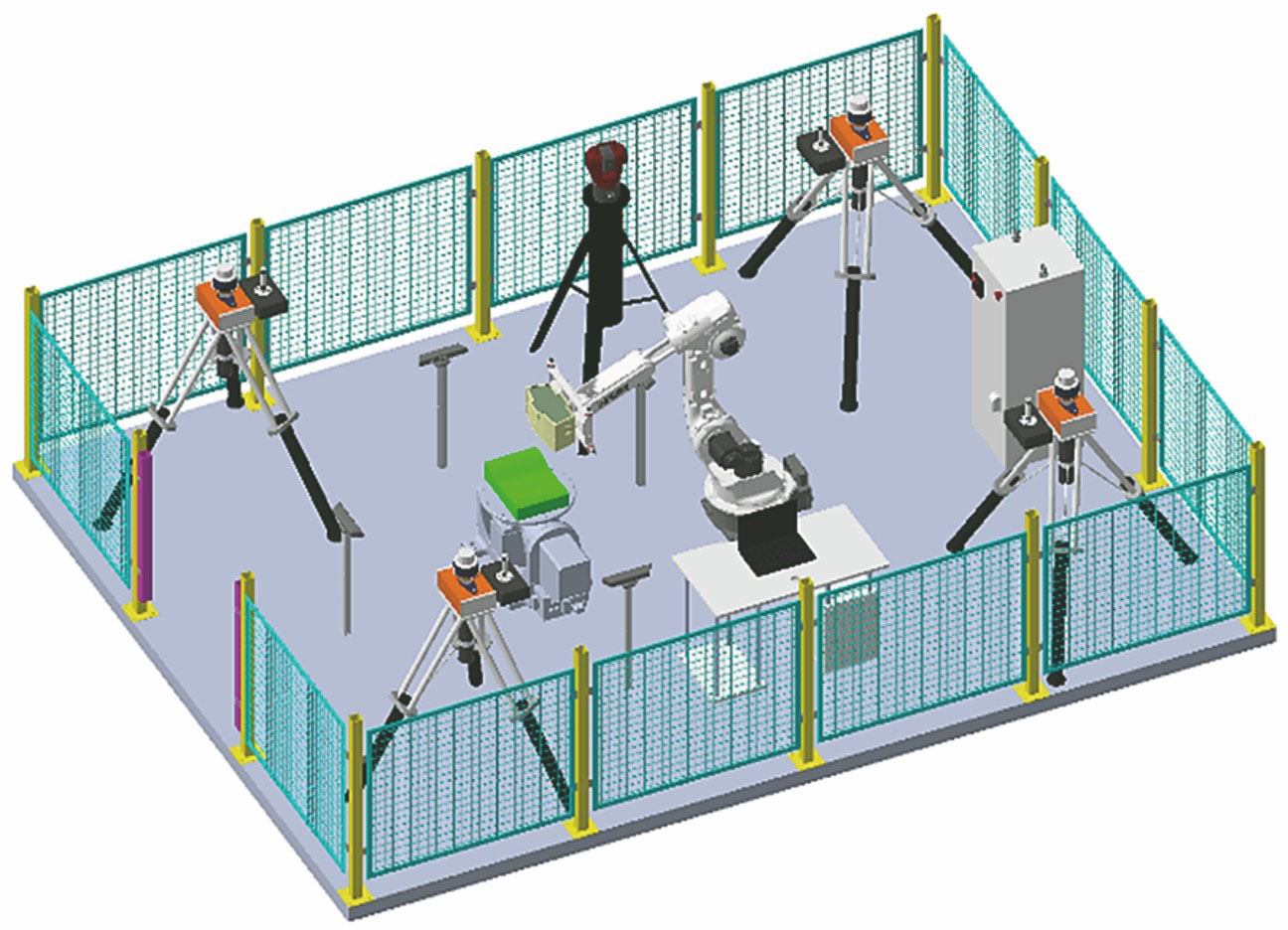
Fig. 2. Overall layout
Fig. 3. Optical topography sensor
Fig. 4. Morphology sensor measurement principle
Fig. 5. Compositional devices of iGPS system
Fig. 6. iGPS measurement principle schematic
Fig. 7. System coordinate system. (a) Coordinate system related to robot system; (b) iGPS coordinate system
Fig. 8. Robot measurement system
Fig. 9. Measurement experiment of double arched workpiece
Fig. 10. Measured workpiece deviation comparison result
|
Table 1. Verification experiment data of length measurement accuracy
|
Table 2. Data of repeated measurement accuracy verification experiment

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20