
He Wang, Zeming Li. Calibration method of laser range finder and camera in information fusion process[J]. Infrared and Laser Engineering, 2020, 49(4): 0413002
- Infrared and Laser Engineering
- Vol. 49, Issue 4, 0413002 (2020)
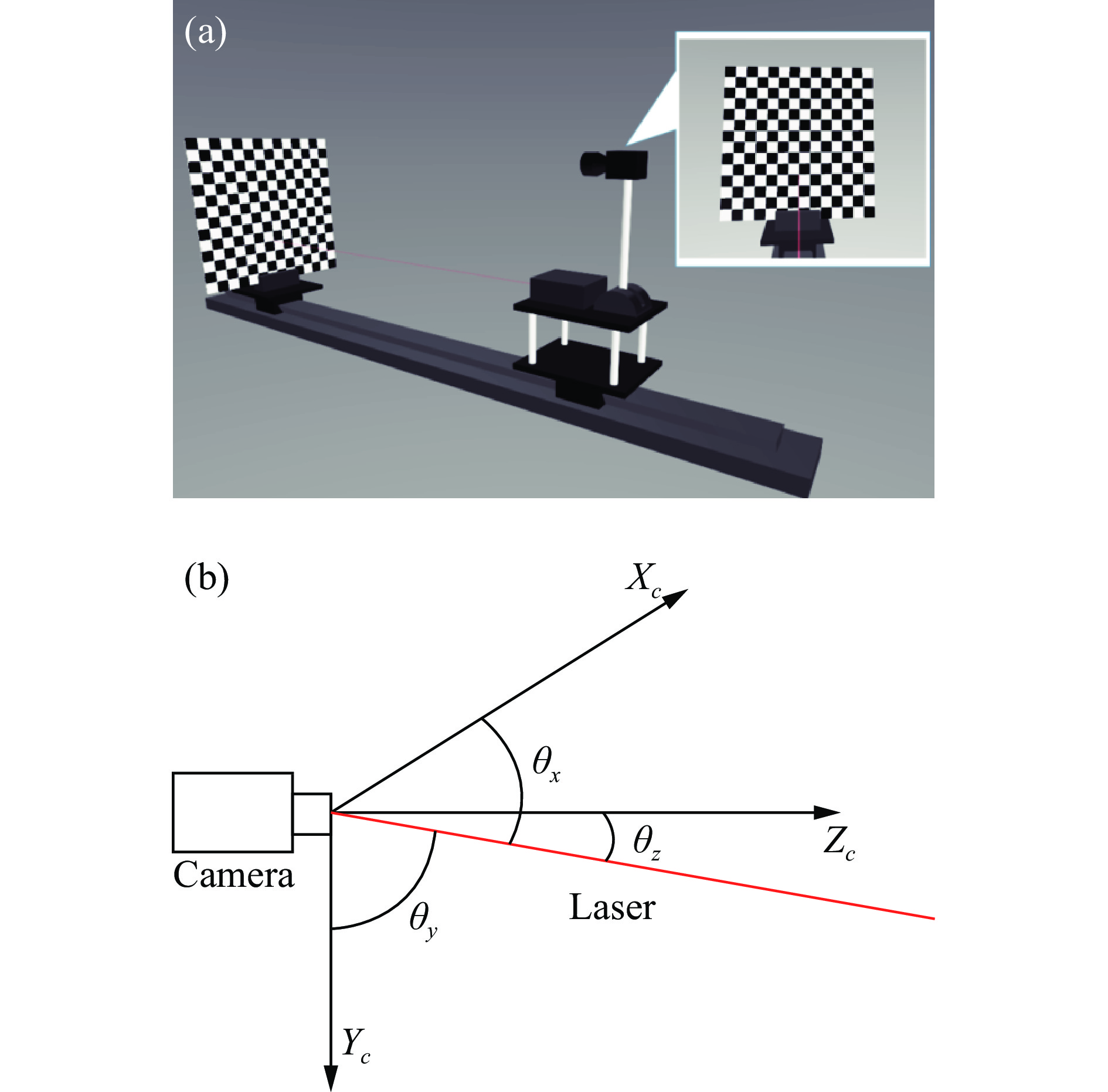
Fig. 1. (a) Laser range finder and camera calibration diagram, (b) Angle between laser and camera axes
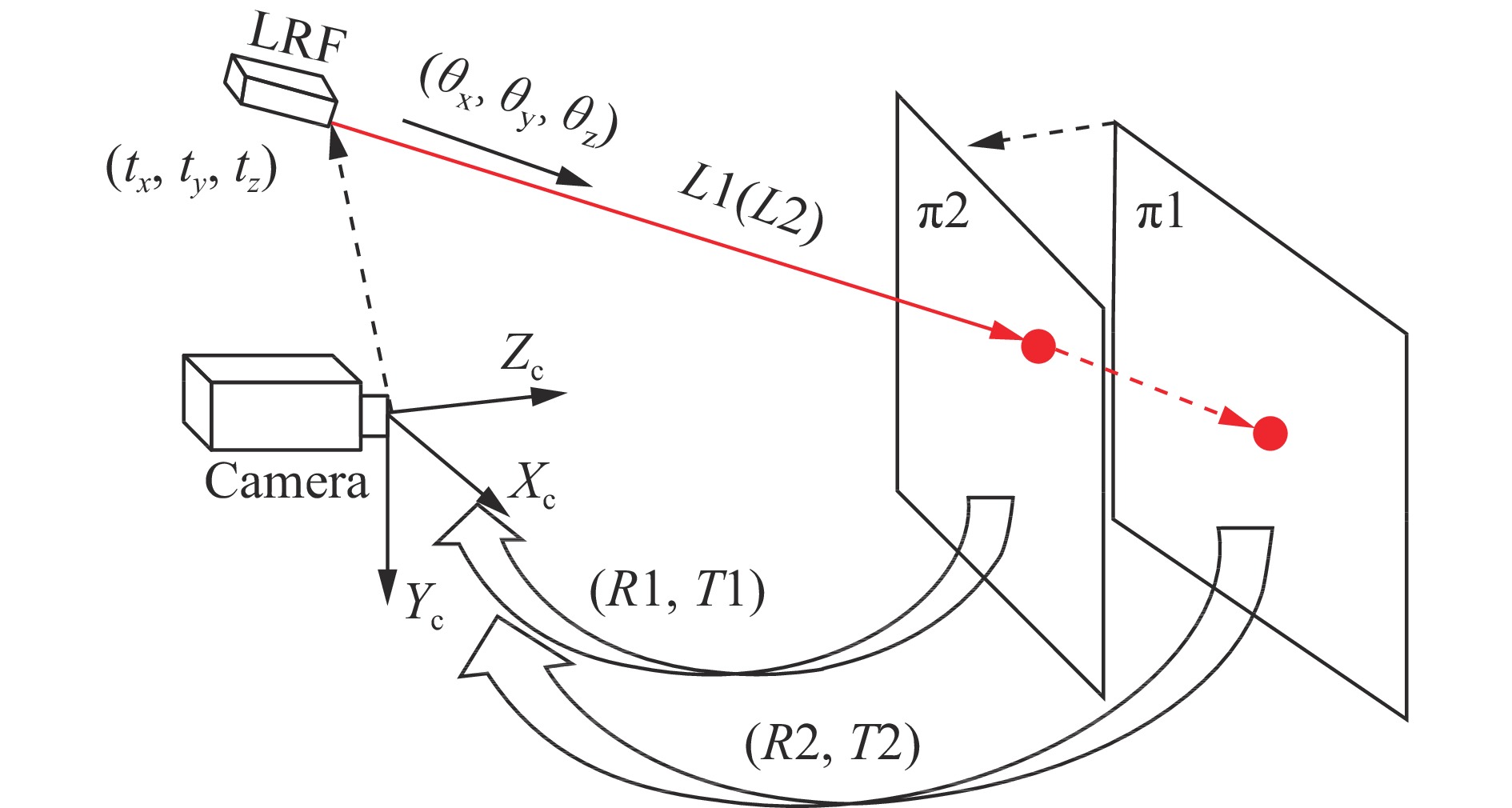
Fig. 2. Schematic diagram of method 1
Fig. 3. Schematic diagram of method 2
Fig. 4. Laser spot falls on the chessboard in different postures
Fig. 5. Invisible laser spot falls on the chessboard in different postures
Fig. 6. Comparison of the actual position and calculated position of the laser spot. (a) Red rectangle is the position calculated by method 1; (b) Blue rectangle is the position calculated by method 2
Fig. 7. Position error of different number of checkerboard postures in methods 1 and 2
Fig. 8. Position error distribution for method 1 (top) and method 2 (bottom)
Fig. 9. Coordinate error of the number of poses for method 1 (black) and method 2 (red)
|
Table 1. Calculation parameters of the chessboard plane
|
Table 2. Comparison of three calibration algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20