
Cong Sun, Zhenglei Yang, Mengna Jia, Qifeng Yu. Conics and Line Fusion Features Based Calibration of Telephoto Camera[J]. Acta Optica Sinica, 2022, 42(12): 1212003
- Acta Optica Sinica
- Vol. 42, Issue 12, 1212003 (2022)
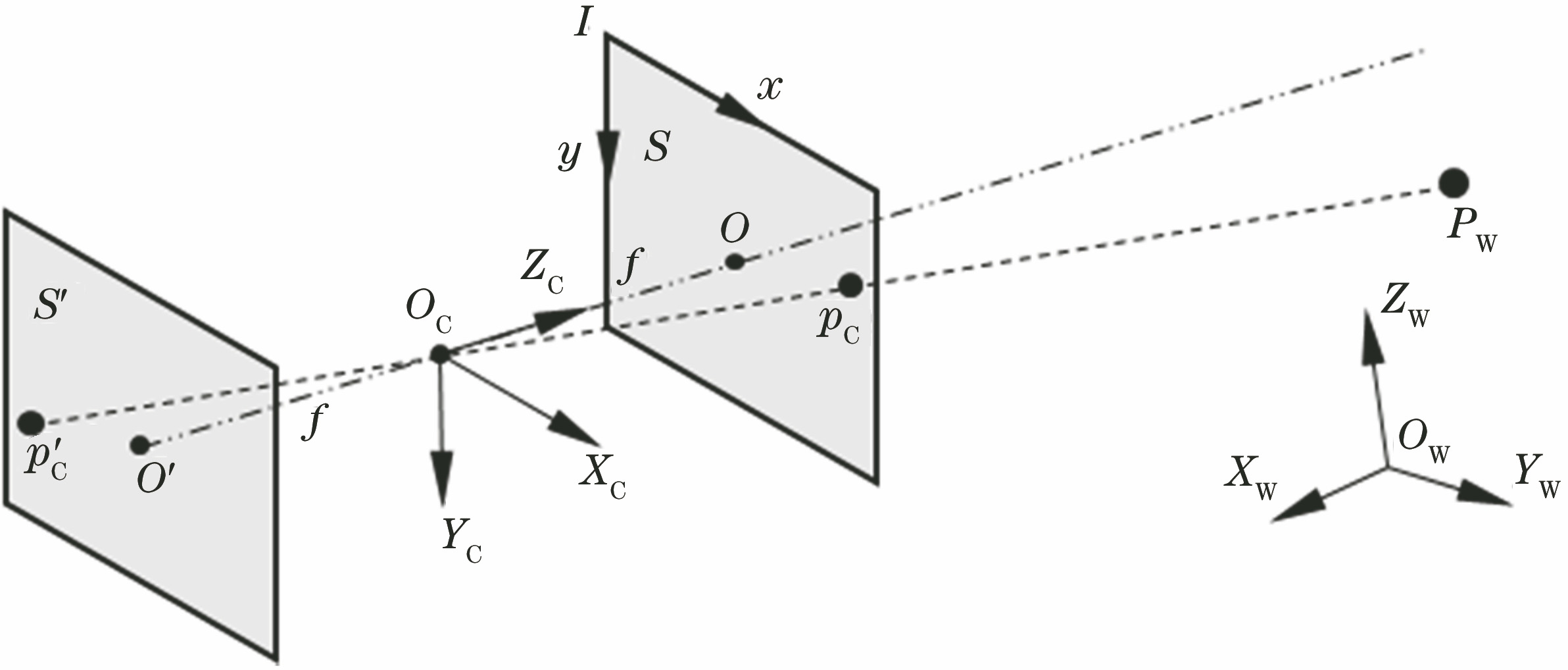
Fig. 1. Imaging model of central perspective projection
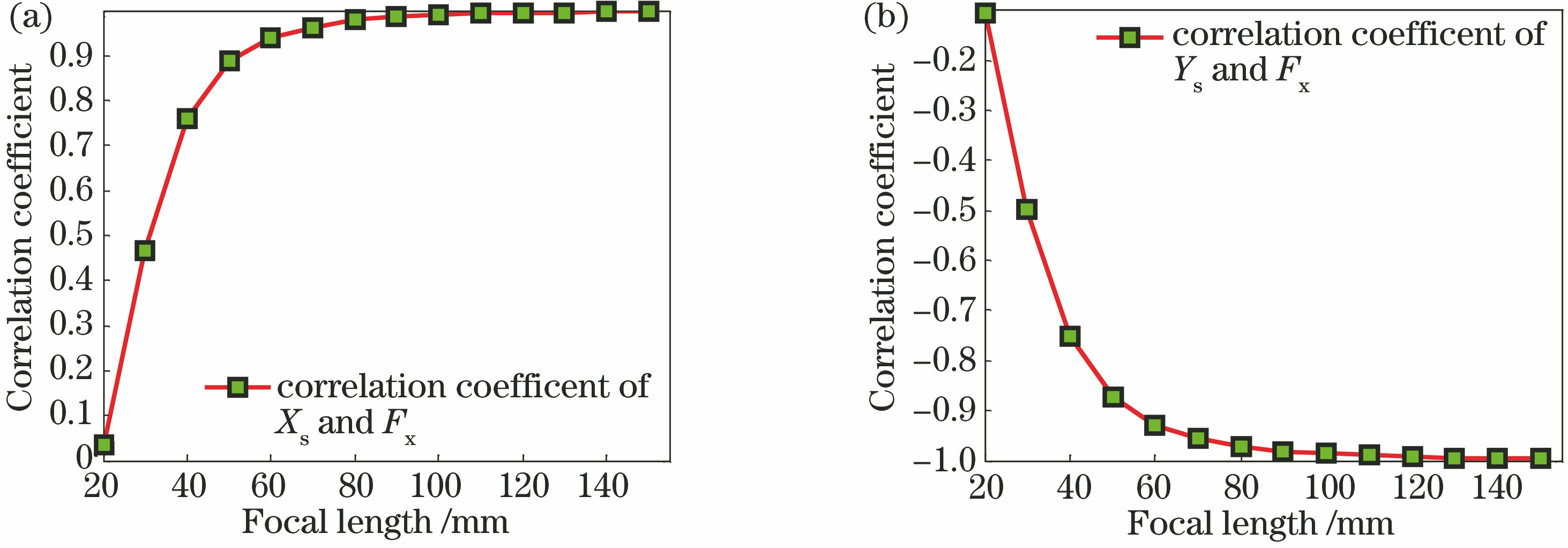
Fig. 2. Correlation coefficient between translation component and equivalent focal length of camera varying with focal length. (a) Translation component in x direction; (b) translation component in y direction
Fig. 3. Standard concentric semi-circular cooperative template
Fig. 4. Cooperative concentric semi-elliptical template after projective transformation
Fig. 5. Perspective projection imaging model of 3D lines
Fig. 6. Flow chart of calibration algorithm
Fig. 7. RMS of relative error of calibration parameters of camera (f=20 mm) under different number of calibration views. (a) Fx; (b) Cx
Fig. 8. RMS of relative error of calibration parameters of camera (f=20 mm) under different noise level. (a) Fx; (b) Cx
Fig. 9. RMS of relative error of calibration parameters of camera (f=100 mm) under different number of calibration views. (a) Fx; (b) Cx
Fig. 10. RMS of relative error of calibration parameters of camera (f=100 mm) under different noise level. (a) Fx; (b) Cx
Fig. 11. RMS of relative error of camera calibration parameters under different focal lengths. (a) Fx; (b) Cx
Fig. 12. Detection results of concentric elliptical template
Fig. 13. Typical reconstruction results of stereo telephoto camera plane template. (a) Reconstructed 3D checkerboard points and fitted plane; (b) error distribution of reconstructed plane
|
Table 1. Results of different calibration algorithms under condition of 35 mm focal length
|
Table 2. Results of different calibration algorithms under the condition of 75 mm focal length
|
Table 3. RMS of off-plane displacements reconstructed by output parameters of different calibration methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20