
Haihua Cui, Huacheng Lou, Wei Tian, Yihua Zhang. High-Precision Visual Positioning of Hole-Making Datum for Orbital Crawling Robot[J]. Acta Optica Sinica, 2021, 41(9): 0915002
- Acta Optica Sinica
- Vol. 41, Issue 9, 0915002 (2021)
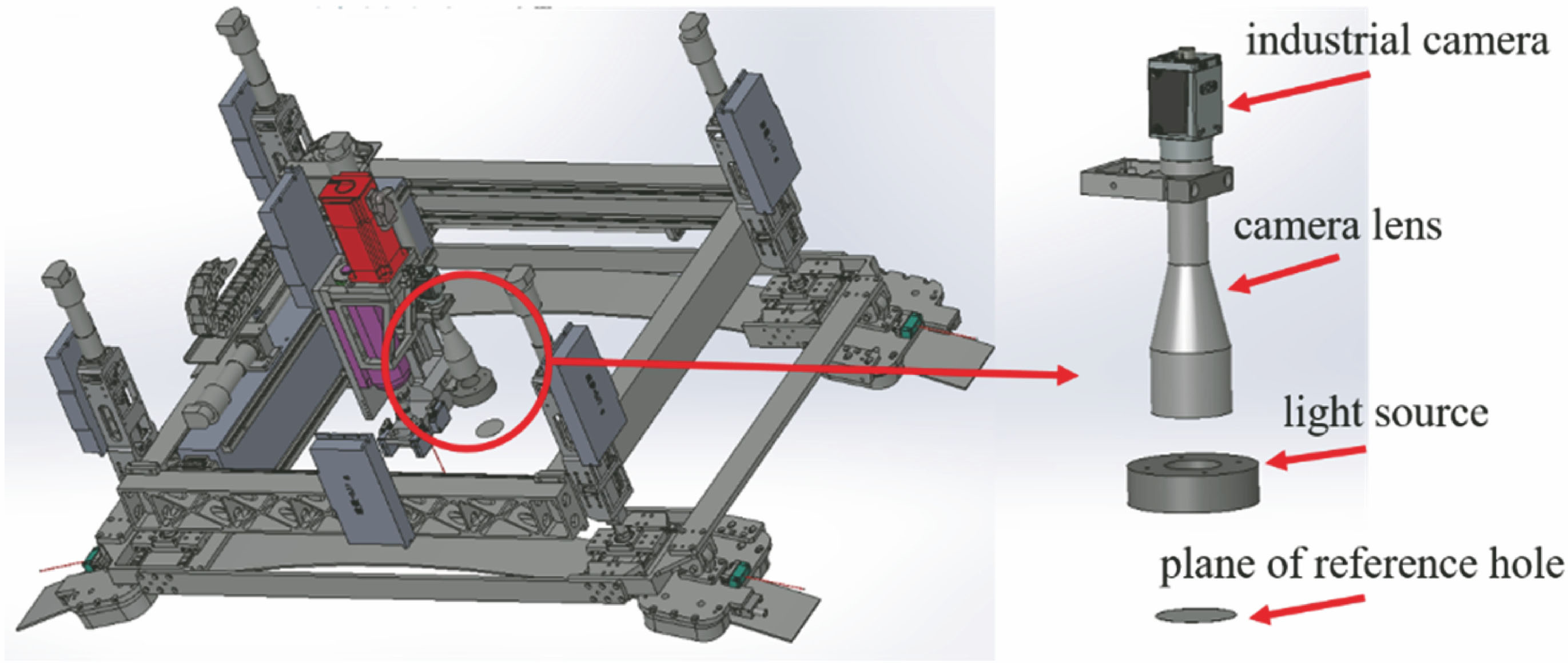
Fig. 1. Structure of the orbital crawling hole-making robot
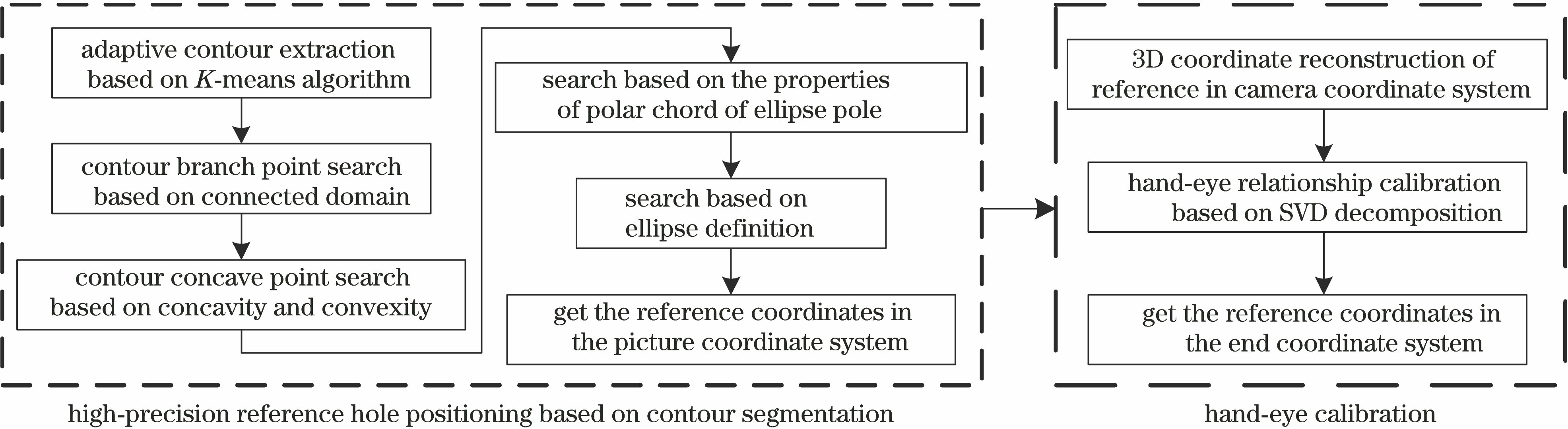
Fig. 2. Flow chart of measuring reference hole
Fig. 3. Comparison of reference holes. (a) Ordinary reference hole; (b) reference hole with core clip
Fig. 4. Gray distribution of the reference hole image with the core clip
Fig. 5. Searching process of the concave point
Fig. 6. Rough positioning of the reference hole profile. (a) Pole and pole chord theorem of the ellipse; (b) rough positioning of the actual reference hole
Fig. 7. Schematic diagram of the profile fitting
Fig. 8. Schematic diagram of the hand-eye calibration. (a) Hand-eye calibration coordinate system; (b) schematic diagram of the special target
Fig. 9. Diagram of the experimental setup. (a) Hole-making robot; (b) position of the vision system
Fig. 10. Reference hole positioning results under different parameters. (a) δdis=3; (b) δdis=6; (c) δdis=10
Fig. 11. Positioning results of our method under different lighting conditions. (a) Light is weak; (b) light is moderate; (c) light is strong
Fig. 12. Positioning results of different contours. (a) Small part of the reference hole edge; (b) most of the reference hole edge; (c) all the reference hole edges
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. [in Chinese]

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20