
Junxin Lu, Zhijun Fang, Jieyu Chen, Yongbin Gao. RGB-D Visual Odometry Combined with Points and Lines[J]. Acta Optica Sinica, 2021, 41(4): 0415001
- Acta Optica Sinica
- Vol. 41, Issue 4, 0415001 (2021)
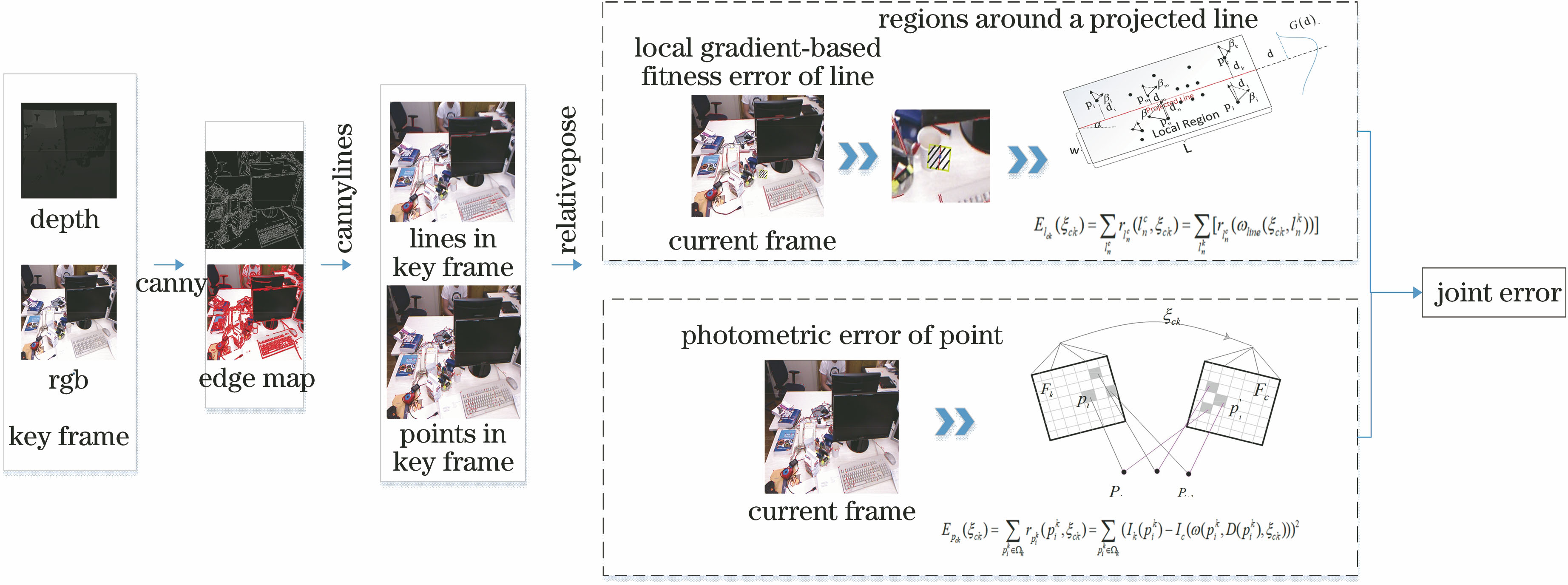
Fig. 1. Framework of system

Fig. 2. Results of each line extraction algorithm in scene of low-texture. (a) Hough transform algorithm; (b) EDLines algorithm; (c) LSD algorithm; (d) CannyLines algorithm
Fig. 3. Local neighborhood of line midpoint
Fig. 4. Dataset of ICL-NUIM
Fig. 5. Results of proposed algorithm on ICL-NUIM dataset. (a) Input images; (b) point and line features extracted from the images; (c) estimated camera trajectories
Fig. 6. Some challenging scenarios of visual odometry. (a) White walls; (b) ceilings; (c) corridors; (d) scenes of illumination change
Fig. 7. Estimated camera trajectories of proposed algorithm on TUM dataset. (a) fr1/desk; (b) fr2/desk; (c) fr3/long_office; (d) fr3/cabinet; (e) fr3/str_ntex_near; (f) fr3/str_ntex_far
Fig. 8. Intuitive diagram of relative pose error of proposed algorithm on TUM dataset. (a) fr1/desk; (b) fr3/long_office; (c) fr3/str_ntex_far
Fig. 9. Estimated camera trajectories of proposed algorithm on CoRBS dataset. (a) D1 sequence; (b) E1 sequence; (c) E4 sequence; (d) H1 sequence
Fig. 10. Location accuracy and convergence time of proposed algorithm using I and
Fig. 11. Location accuracy ATE RMSE and convergence time of our algorithm using
|
Table 1. [in Chinese]
|
Table 2. [in Chinese]
|
Table 3. [in Chinese]
|
Table 4. Comparison of ATE RMSE and RPE RMSE of different algorithms on CoRBS dataset
|
Table 5. [in Chinese]

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20