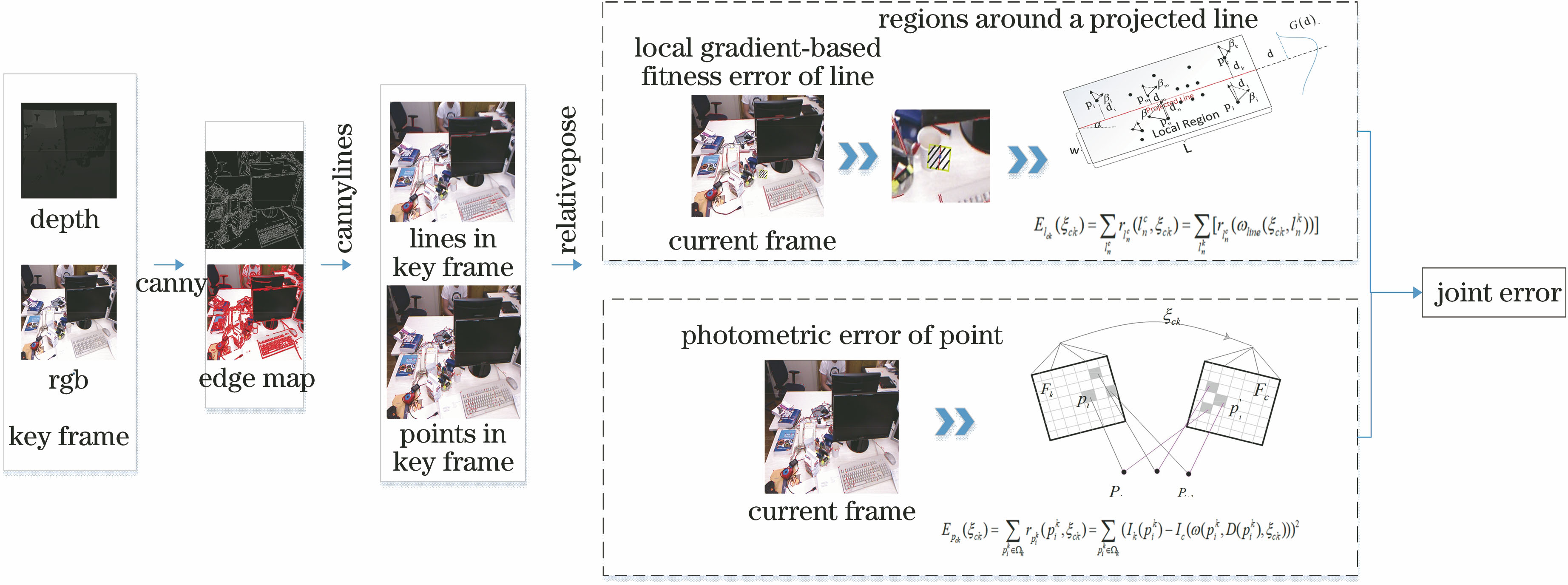
ing at the problem of poor localization accuracy or failure of traditional visual odometry in low-texture scenes, we propose a method of RGB-D visual odometry that combines point and line features. This method unites the unique characteristics of points and lines, and combines the photometric residual of point features and the local gradient fitness error of line features to construct a joint error function that is robust to low-texture scenes. The Gauss-Newton iteration method is used to perform nonlinear iterative optimization of the joint error function to obtain the accurate pose of each frame. The proposed method is evaluated on the public real-world RGB-D dataset and synthetic benchmark dataset. Experimental results show that, compared with other state-of-the-art algorithms, the proposed algorithm has better accuracy and robustness.

Junxin Lu, Zhijun Fang, Jieyu Chen, Yongbin Gao. RGB-D Visual Odometry Combined with Points and Lines[J]. Acta Optica Sinica, 2021, 41(4): 0415001
