
Pang Zhengya, Zhou Zhifeng, Wang Liduan, Ye Juelei. Motion Compensation Method Based on Lidar[J]. Laser & Optoelectronics Progress, 2020, 57(2): 21106
- Laser & Optoelectronics Progress
- Vol. 57, Issue 2, 21106 (2020)
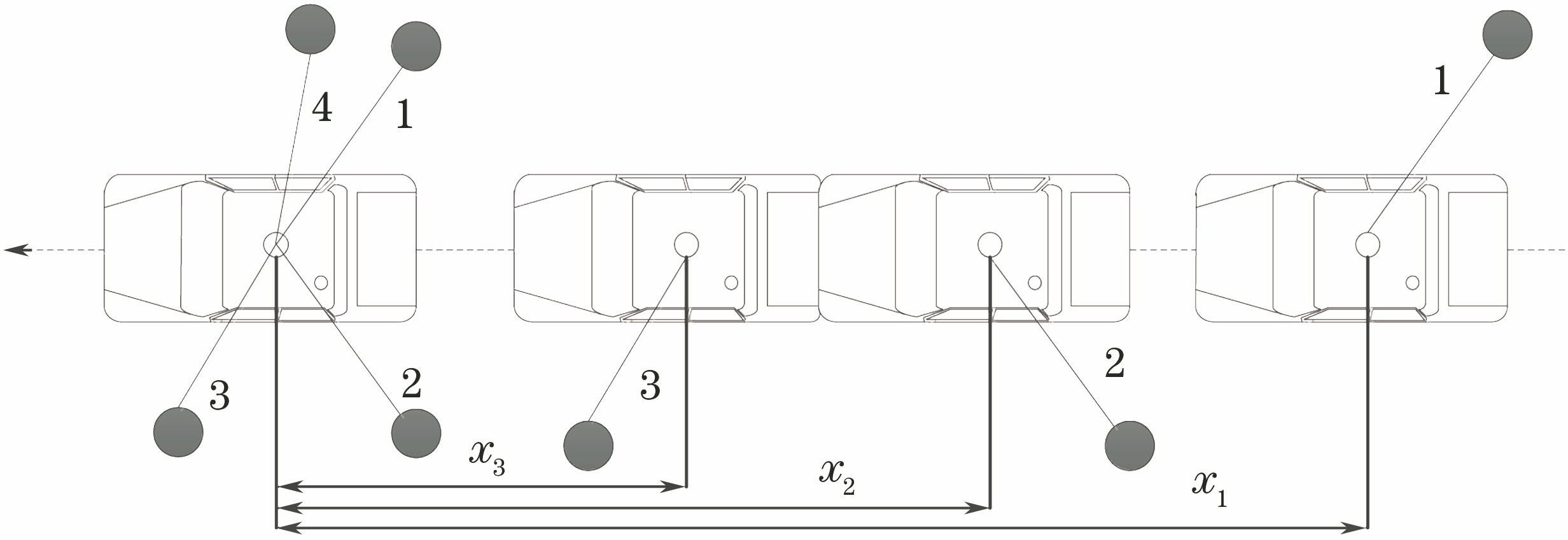
Fig. 1. Schematic of laser radar scanning a circle
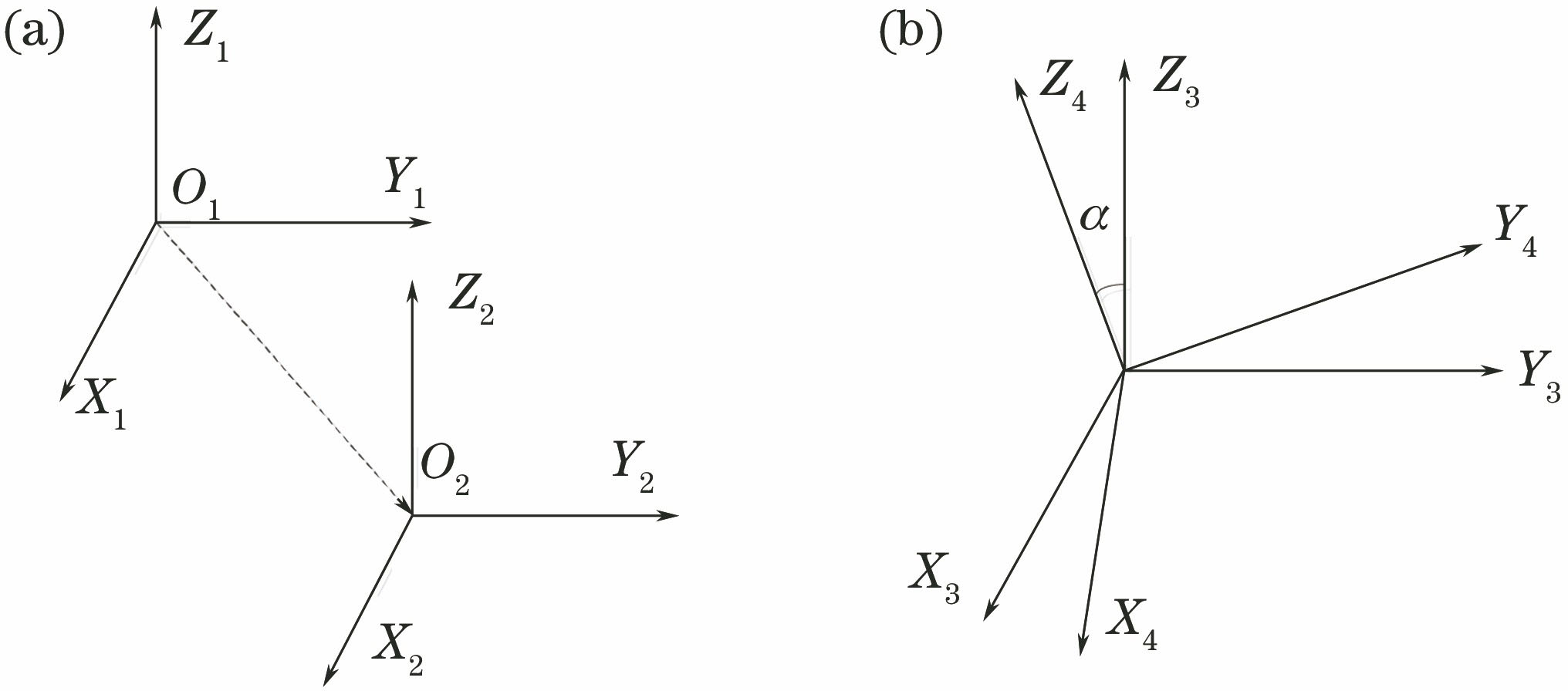
Fig. 2. Schematics of vehicle body coordinate transformation. (a) Translational motion of vehicle body; (b) rotation motion of vehicle body
Fig. 3. Spatial description of quaternion relative to reference coordinate system
Fig. 4. Flow chart of improved motion compensation algorithm
Fig. 5. Improved lidar motion compensation pseudo-code based on Gaussian mixture model
Fig. 6. Lidar installation and experimental equipment
Fig. 7. Original point cloud data
Fig. 8. Point cloud data after motion compensation
Fig. 9. Motion compensation results when vehicle turns at traffic intersection
Fig. 10. Motion compensation results when vehicle enters the motion compensation area
|
Table 1. Comparison of advantages and disadvantages of transformation matrix parameterization methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20