
Xunhua Liu, Shaoyuan Sun, Lipeng Gu, Xiang Li. 3D Object Detection Based on Improved Frustum PointNet[J]. Laser & Optoelectronics Progress, 2020, 57(20): 201508
- Laser & Optoelectronics Progress
- Vol. 57, Issue 20, 201508 (2020)
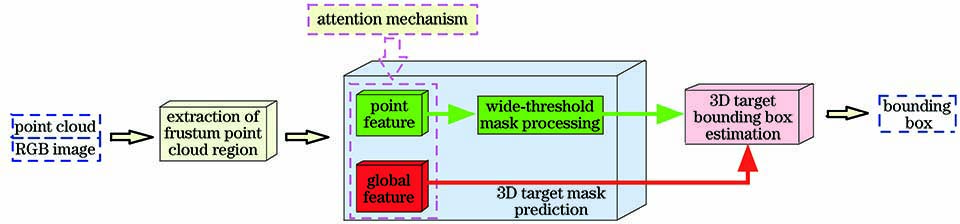
Fig. 1. Improved F-PointNet structure
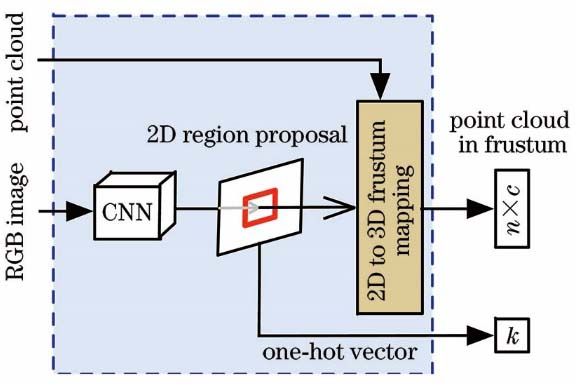
Fig. 2. Network structure for extracting candidate regions of frustum point cloud
Fig. 3. Registration results of 2D images and 3D point clouds. (a) RGB image; (b) 3D point cloud data; (c) registration effect of Fig. (a) and Fig. (b)
Fig. 4. 3D target frustum candidate region initially obtained
Fig. 5. Schematic of viewing frustum orientation adjustment
Fig. 6. 3D target mask prediction network
Fig. 7. Attention mechanism implementation process
Fig. 8. 3D target bounding box prediction network
Fig. 9. Coordinate transformation of target instance point cloud
Fig. 10. Visual 3D target bounding box prediction results. (a) 2D target detection result; (b) 3D target detection result
|
Table 1. Experimental configuration
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. AP values of 3D target detection under each threshold unit: %
| ||||||||||||||||||||||||||||||||||||||||||
Table 3. Influence of each processing part on AP values
| |||||||||||||||||||||||||||
Table 4. Comparison of AP values of different models

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20