
Yuan Zhang, Xiaoyan Li, Xie Han. Three-Dimensional Point Cloud Registration Method with Low Overlap Rate[J]. Laser & Optoelectronics Progress, 2021, 58(8): 0810014
- Laser & Optoelectronics Progress
- Vol. 58, Issue 8, 0810014 (2021)
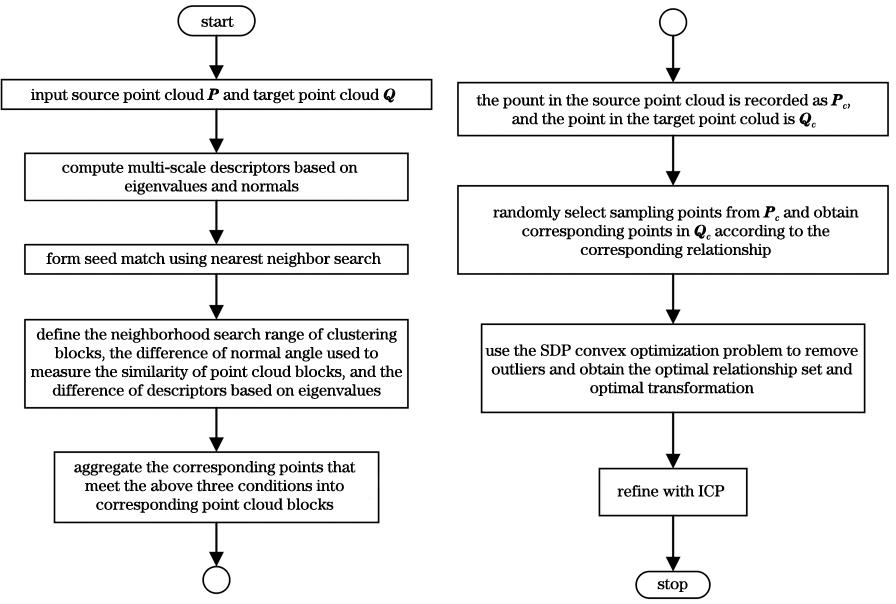
Fig. 1. Main flow chart of proposed algorithm
![Registration results of Bunny000 and Bunny045. (a) Initial position; (b) registering using method of Ref. [11]; (c) registering using method of Ref. [21]; (d) registering using proposed method](/richHtml/lop/2021/58/8/0810014/img_2.jpg)
Fig. 2. Registration results of Bunny000 and Bunny045. (a) Initial position; (b) registering using method of Ref. [11]; (c) registering using method of Ref. [21]; (d) registering using proposed method
Fig. 3. Registration results of Dragon000 and Dragon024. (a) Initial position; (b) registering using method of Ref. [11]; (c) registering using method of Ref. [21]; (d) registering using proposed method
Fig. 4. Registration results of Bunny045 and Bunny090. (a) Initial position; (b) registering using method of Ref. [11]; (c) registering using method of Ref. [21]; (d) registering using proposed method
Fig. 5. Registration results of Dragon000 and Dragon048. (a) Initial position; (b) registering using method of Ref. [11]; (c) registering using method of Ref. [21]; (d) registering using proposed method
Fig. 6. Registration results of Happy048 and Happy096. (a) Initial position; (b) registering using method of Ref. [11]; (c) registering using method of Ref. [21]; (d) registering using proposed method
Fig. 7. Registration results of Chair1 and Chair2. (a) Initial point cloud 1; (b) initial point cloud 2; (c) registering using proposed method
Fig. 8. Registration results of Motobike1 and Motobike2. (a) Initial point cloud 1; (b) initial point cloud 2; (c) registering using proposed method
|
Table 1. Comparison of point cloud registration results with high overlap rate
|
Table 2. Comparison of point cloud registration results with low overlap rate
|
Table 3. Registration performance of real 3D scan data

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20