
Xi Zhang, Jian Zhang. Summary on Calibration Method of Line-Structured Light[J]. Laser & Optoelectronics Progress, 2018, 55(2): 020001
- Laser & Optoelectronics Progress
- Vol. 55, Issue 2, 020001 (2018)
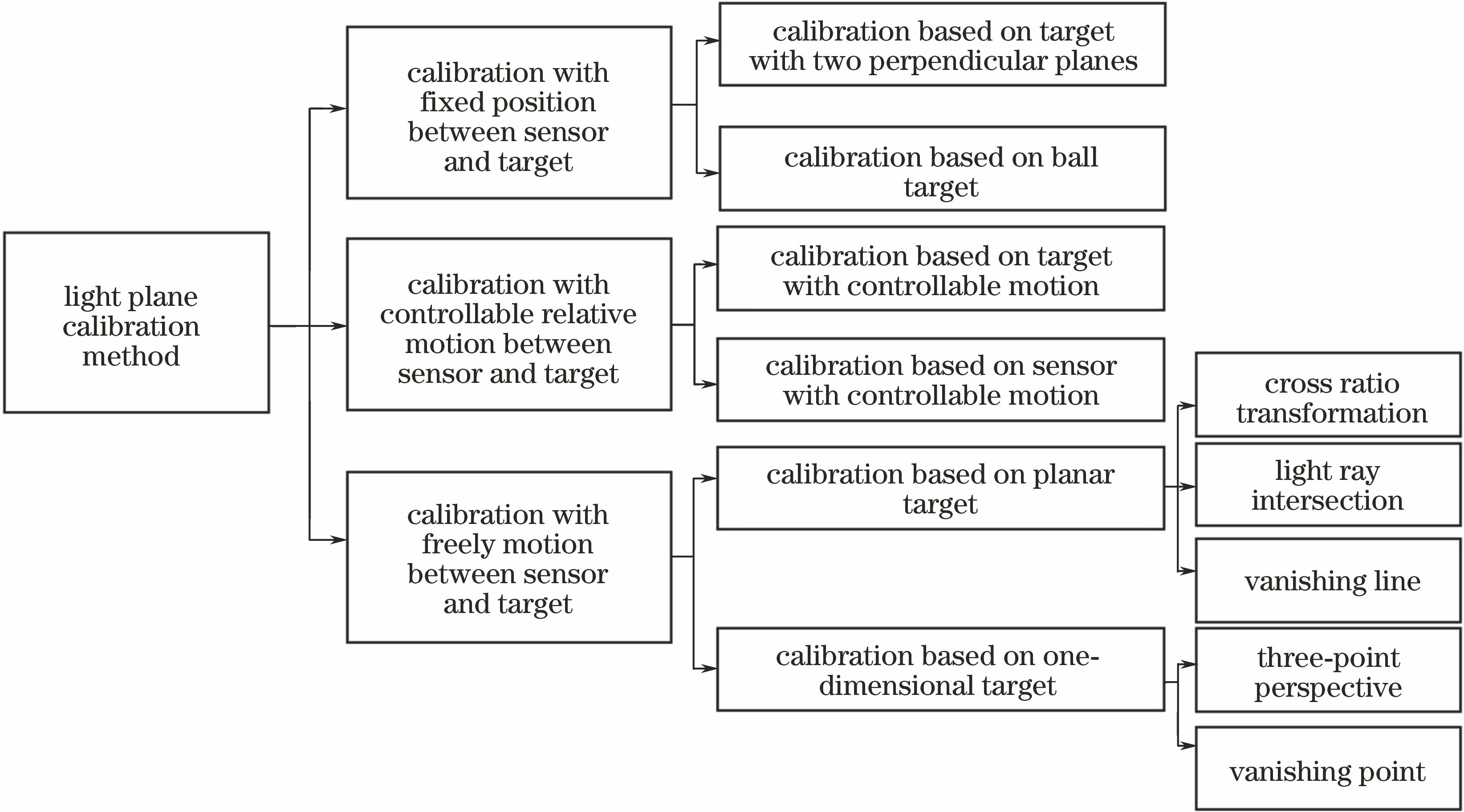
Fig. 1. Main calibration method of light plane
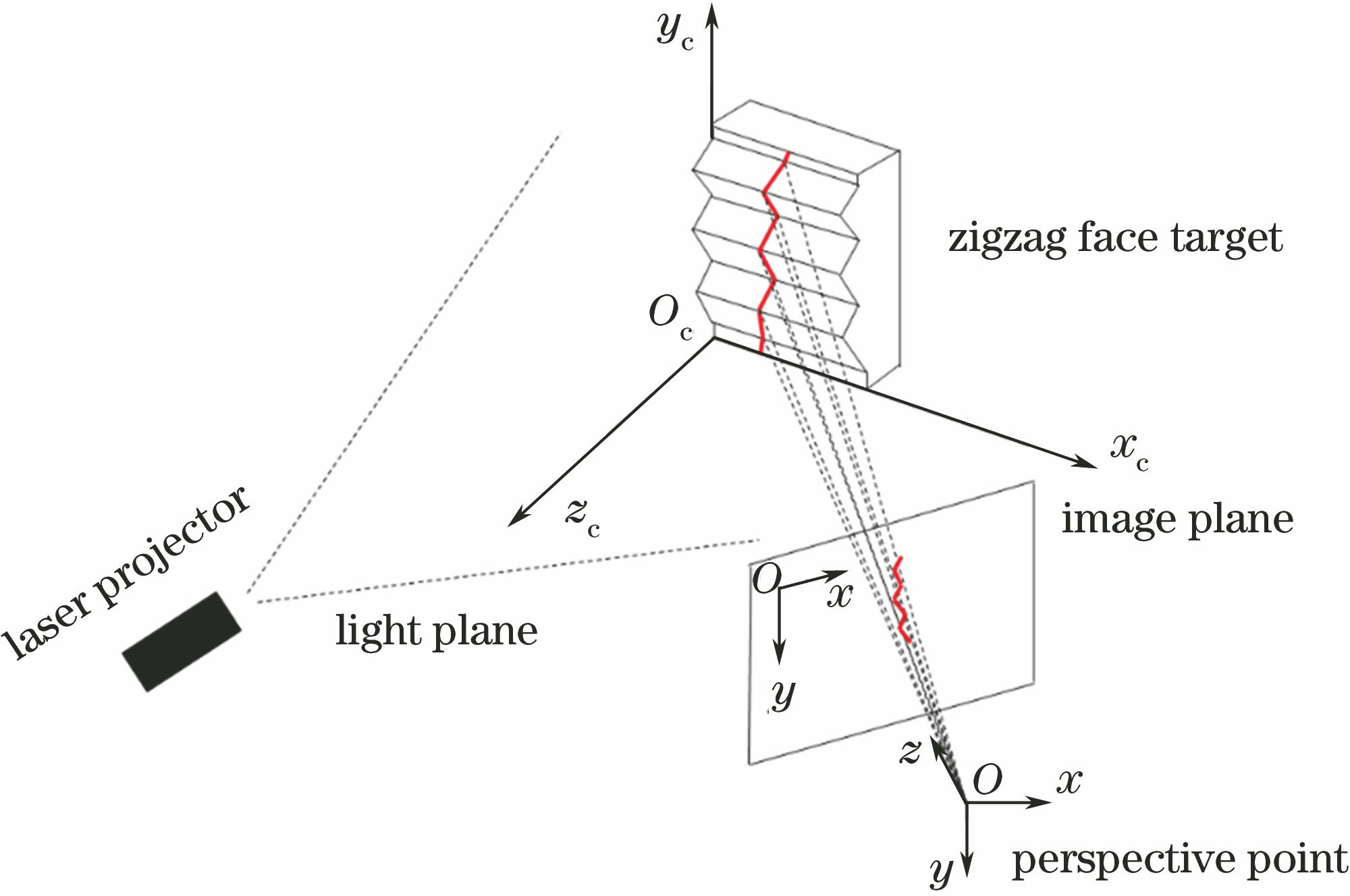
Fig. 2. Schematic of zigzag piece calibration
Fig. 3. Diagram of calibration method based on parallel straight line constraint. (a) Planar target; (b) projected image
Fig. 4. Diagram of P3P. (a) Schematic of light plane calibration; (b) plane geometric model of point
|
Table 1. List of commonly used calibration targets
|
Table 2. Evaluation of calibration accuracy of commonly used line structured light

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20