
Chang Wang, Qin Shu, Yunxiu Yang, Shijie Deng. Point Cloud Registration in Multidirectional Affine Transformation with Variance Compensation[J]. Acta Optica Sinica, 2019, 39(2): 0215002
- Acta Optica Sinica
- Vol. 39, Issue 2, 0215002 (2019)
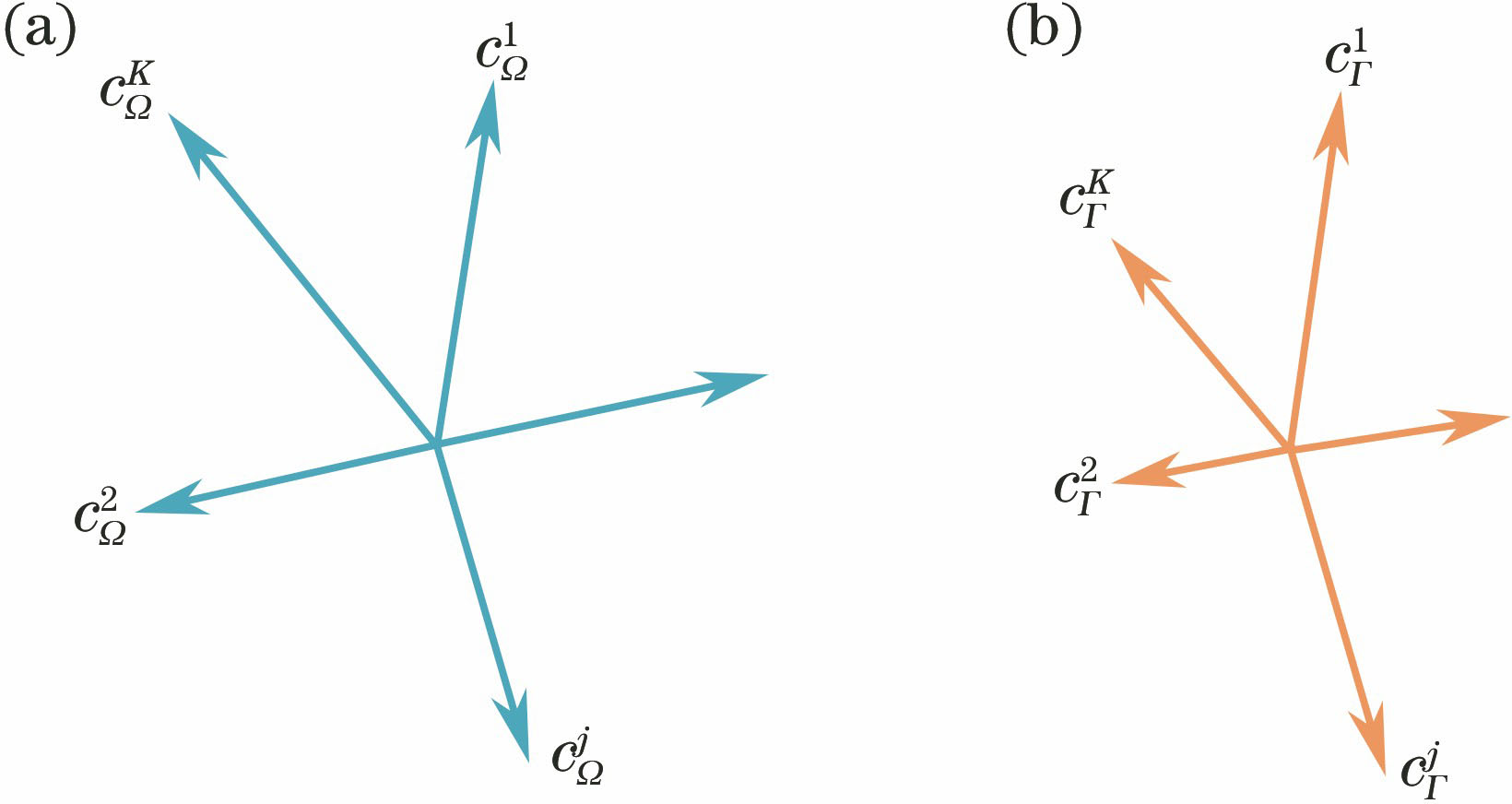
Fig. 1. Global vector features. (a) In Ω; (b) in Γ
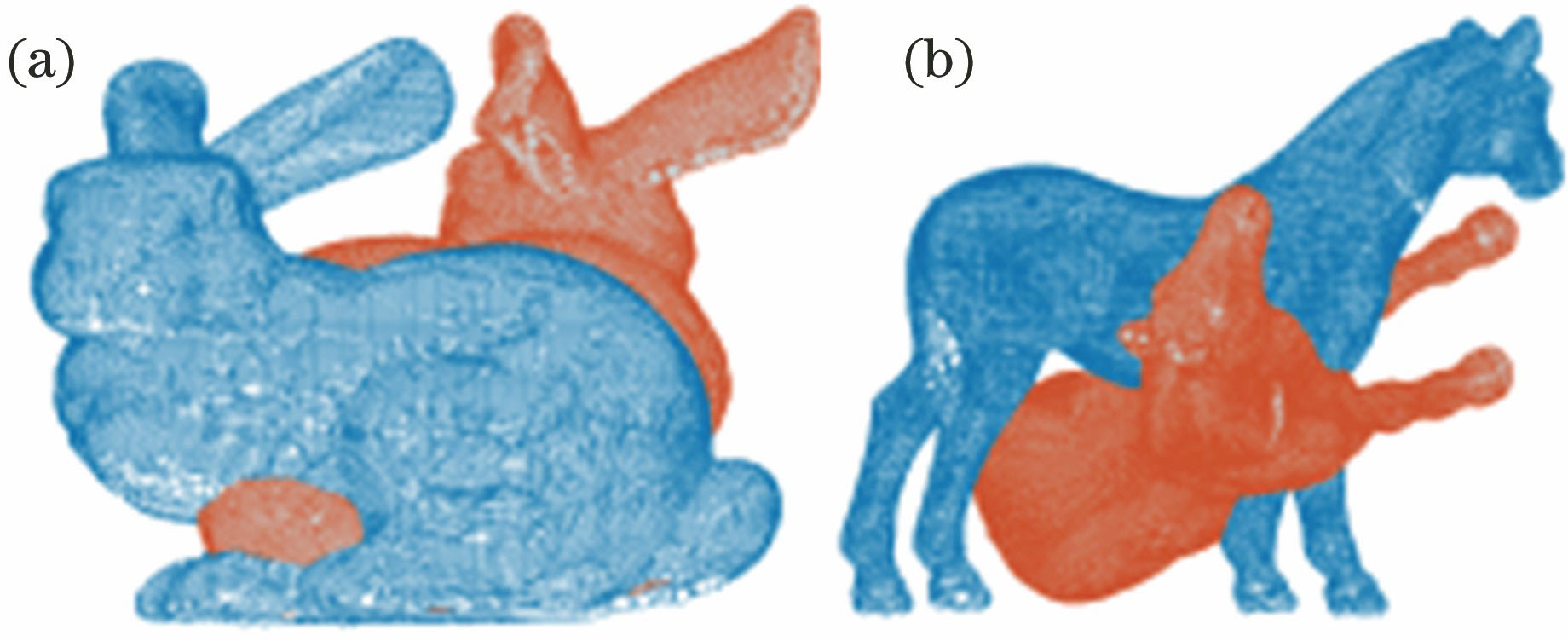
Fig. 2. Initial states of point clouds. (a) Bunny; (b) Horse
Fig. 3. Registration effects of point clouds after similarity transformation by different algorithms. (a) Algorithm in Ref. [4]; (b) ICP; (c) Scale-ICP; (d) CPD; (e) MARVC
Fig. 4. Initial states after multidirectional affine transformation. (a) Bunny; (b) Horse
Fig. 5. Registration effects for different algorithms after multidirectional affine transformation. (a) Algorithm in Ref. [4]; (b) ICP; (c) Scale-ICP; (d) CPD; (e) MARVC
Fig. 6. Registration effects of point clouds for different algorithms under random loss and multi-directional affine transformation. (a) Scale-ICP; (b) CPD; (c) MARVC
Fig. 7. Registration effects of point clouds with 20 dB random noise for different algorithms under random loss and multi-directional affine transformation. (a) ICP; (b) Scale-ICP; (c) CPD; (d) MARVC
Fig. 8. Actual objects scanned by portable laser scanner, obtained data, and registration effects. (a) Three groups of objects; (b) obtained data; (c) registration effects by MARVC algorithm
|
Table 1. RMSE for different algorithms mm
|
Table 2. Registration time for different algorithmss
|
Table 3. RMSE for different algorithmsmm
|
Table 4. Registration time for different algorithmss
|
Table 5. RMSE for different algorithms after random loss of data pointsmm
|
Table 6. Registration time for different algorithms after random loss of data pointss
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 7. RMSE for different algorithms under different interference environmentsmm
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 8. Registration time for different algorithms under different interference environmentss
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 9. Registration effects of three groups of objects for different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20